ΒΎ °ΈεΫλ÷–Ιζ«ύ…ΌΡξΜζΤς»ΥΨΚ»ϋFLL ΜζΤς»ΥΧτ’Ϋ»ϋ÷ςΧβ”κΙφ‘ρ
1 FLL ΜζΤς»ΥΧτ’Ϋ»ϋΦρΫι
FLL ΜζΤς»ΥΧτ’Ϋ»ϋ «“Μœν“ΐΫχΒΡ«ύ…ΌΡξΙζΦ ΜζΤς»Υ±»»ϋœνΡΩΓΘ“Σ«σ≤ΈΦ”±»»ϋΒΡ¥ζ±μ Ε”Ή‘––…ηΦΤΓΔ÷ΤΉςΜζΤς»Υ≤ΔΫχ––±ύ≥ΧΓΘ≤Έ»ϋΒΡΜζΤς»ΥΩ…‘ΎΧΊΕ®ΒΡΨΚ»ϋ≥ΓΒΊ…œΘ§Α¥’’“ΜΕ® ΒΡΙφ‘ρΫχ––±»»ϋΓΘ‘Ύ÷–Ιζ«ύ…ΌΡξΜζΤς»ΥΨΚ»ϋ÷–…η÷Ο FLL ΜζΤς»ΥΧτ’Ϋ»ϋΒΡΡΩΒΡ «ΦΛΖΔΈ“Ιζ «ύ…ΌΡξΕ‘ΜζΤς»ΥΦΦ θΒΡ–Υ»ΛΘ§ΈΣΙζΦ FLL ΜζΤς»ΥΧτ’Ϋ»ϋ―ΓΑΈ≤Έ»ϋΕ”ΓΘ
2 ΨΚ»ϋ÷ςΧβ
±ΨΫλ FLL Χτ’Ϋ»ϋΒΡ÷ςΧβΈΣ“ΈόΫγΩΈΧΟ”ΓΘ ―ß–ΘΒΡΩΈΧΟΫΧ”ΐ «ΟΩΗω»Υ“Μ…ζ÷–Υυ ήΫΧ”ΐΉν÷Ί“ΣΉι≥…≤ΩΖ÷Θ§»Υ»ΥΕΦ“Σ‘Ύ―ß–ΘάοΫ” ήΦΤΜ°–‘ΒΡ÷ΗΒΦΘ§œΒΆ≥ΒΊ―ßœΑΈΡΜ·÷Σ ΕΓΔ…γΜαΙφΖΕΓΔΒάΒ¬ΉΦ‘ρΚΆΦέ÷ΒΙέΡνΓΘ―ß–ΘΫΧ”ΐ¥”Ρ≥ ÷÷“β“ε…œΫ≤Θ§ΨωΕ®Ή≈Ηω»Υ…γΜαΜ·ΒΡΥ°ΤΫΚΆ–‘÷ ΓΘ÷Σ ΕΨ≠ΦΟ ±¥ζ“Σ«σ…γΜαΉπ Π÷ΊΫΧΘ§―ß–Θ ΫΧ”ΐ‘Ϋά¥‘Ϋ ή÷Ί ”Θ§‘Ύ…γΜα÷–»‘»ΜΤπΒΫΨΌΉψ«α÷ΊΒΡΉς”ΟΓΘ
ΩΤ―ß”κΦΦ θΒΡΖ…ΥΌΖΔ’Ι“ΐΖΔΝΥ÷Σ Ε”κΦΦΡήΒΡ±§ΖΔ Ϋ‘ω≥ΛΘ§Ά§ ±Θ§“≤‘λΨΆΝΥΚήΕύ–¬”± ΒΡ―ßœΑΖΫ ΫΓΘ…γΜαΒΡΖΔ’Ι“Σ«σΈ“Ο«ΒΡ―ß…ζ―ßΜα»œ÷ΣΘ§―ßΜαΉω ¬Θ§―ßΜαΙ≤Ά§…ζΜνΘ§―ßΜα…ζ ¥φΘ§–η“Σ―ßΒΡΕΪΈςΧΪΕύΝΥΓΘΖΔ’ΙΒΡœ÷ Β”κ“Σ«σΆΙœ‘ΝΥ¥ΪΆ≥―ß–ΘΫΧ”ΐΒΡ≤ΜΉψ”κ±ΉΕΥΓΘΕΰ ° άΦΆΝυ °Ρξ¥ζΈ“ΙζΝς––ΒΡ“ΩΣΟ≈Αλ―ß””…”ΎΒ± ±ΒΡΧθΦΰ≤ΜΨΏ±ΗΕχ“λΜ·Θ§Εύ ήΚσ»ΥΒΡΎΗ≤ΓΓΘ Ρ―ΒάΈ“Ο«≤ΜΡή‘Ύ–¬ΒΡάζ ΖΧθΦΰœ¬Η≥”ηΤδ–¬ΒΡΡΎΚ≠¬πΘΩ «ΒΡΘ§ΩœΕ®ΡήΘΓ
FLL≤Έ»ϋΕ”‘±Θ§»ΟΡψΟ«ΒΡ¥¥–¬ΥΦΈ§Ζ–ΧΎΤπά¥ΈΣΗΡΫχ―ßœΑΖΫ ΫΙ±œΉ¥œΟς≤≈÷«Α…ΘΓ‘Ύ“Έό ΫγΩΈΧΟ”Χτ’Ϋ»ϋ÷–Θ§ΡψΟ«ΫΪ―–ΨΩ–¬ΒΡ―ßœΑΖΫ ΫΓΘ≤Έ»ϋΕ”ΫΪ»œ ΕΒΫ»γΚΈ“‘’β÷÷ΖΫ Ϋ’ΤΈ’Ηϋ ΕύΓΔΗϋ–¬ΒΡ÷Σ ΕΚΆΦΦΡήΓΘ‘Ύ“ΈόΫγΩΈΧΟ”Χτ’Ϋ»ϋ÷–––Ε·Τπά¥Α…ΘΓ
≤ΈΦ”Χτ’Ϋ»ϋΒΡΚΔΉ”Ο«“ΣœώΩΤ―ßΦ“ΚΆΙΛ≥Χ ΠΡ«―υ»ΞΥΦΩΦΓΘ‘Ύ“ΈόΫγΩΈΧΟ”ΜζΤς»Υ±»»ϋ ÷–Θ§≤Έ»ϋΕ”ΫΪ”Οά÷ΗΏΒΡ MINDSTORM ΙΙΫ®ΚΆ≤β ‘“ΜΧ®Ή‘÷ςΒΡΜζΤς»Υ≤Δ±ύ÷ΤΤδ≥Χ–ρΘ§Άξ ≥…“ΜœΒΝ–œσ’ς–‘»ΈΈώΓΘΥϊΟ«‘ΎΩΈΧβ―–ΨΩ÷–ΜΙ“Σ―Γ‘ώΚΆΫβΨωœ÷ Β άΫγΒΡΈ ΧβΓΘ
Έ“Ο«œΘΆϊ≤Έ”κ“ΈόΫγΩΈΧΟ”Χτ’Ϋ»ϋΒΡΚΔΉ”Ο«‘Ύ”ΠΕ‘ΩΤ―ß”κΦΦ θΒΡΖΔ’Ι÷–±μœ÷ΒΟΉ‘–≈ ≤Δ”κ÷Ύ≤ΜΆ§ΓΘ
3 ±»»ϋ≥ΓΒΊ”κΜΖΨ≥
3.1 ≥ΓΒΊ
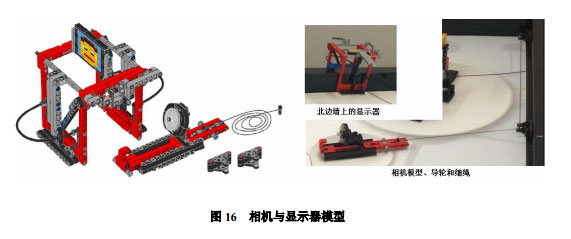
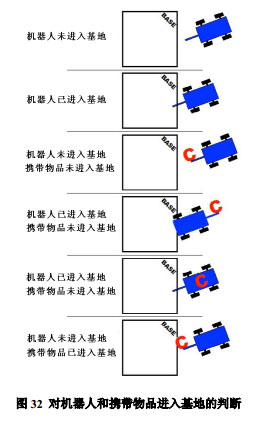
ΆΦ 1 «±»»ϋ≥ΓΒΊΓΘ“Μ’≈”Γ÷ΤΒΡ≥ΓΒΊΡΛ…œ…Δ≤ΦΉ≈Εύ÷÷»ΈΈώΡΘ–ΆΓΘ”––©»ΈΈώΡΘ–Ά «”ΟΉ” ΡΗΩέΙΧΕ®‘Ύ≥ΓΒΊΡΛ…œΒΡΘ§‘Ύ’ϊΗω±»»ϋΤΎΦδΘ§ΜζΤς»Υ≤ΜΡή≈≤Ε·ΥϋΟ«ΒΡΈΜ÷ΟΘ§÷ΜΡήΕ‘ΡΘ–Ά…œ ΒΡΩ…Ε·≤ΩΦΰΫχ––≤ΌΉςΘΜΜΙ”––©ΡΘ–Ά «…ΔΖ≈‘Ύ≥ΓΒΊΡΛ…œΒΡΘ§ΜζΤς»Υ‘ΎΆξ≥…»ΈΈώ ±Ά®≥ΘΘ®ΒΪ ≤ΜΨχΕ‘Θ© «“Σ»ΟΥϋΟ«Μρ¥χΥϋΟ«ΜΊΒΫΜυΒΊΒΡΓΘ
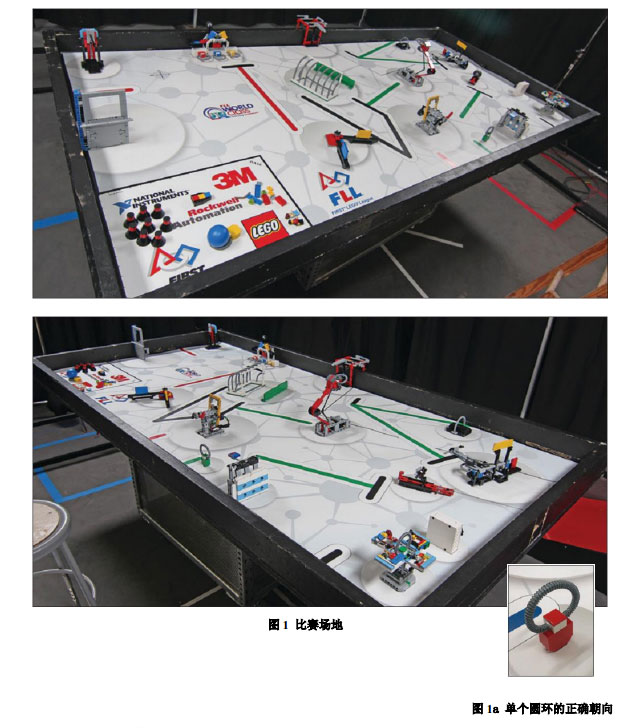
Ε‘ΆΦ 1 ΒΡ–ό’ΐ «ΘΚ≥ΓΒΊΡœΟφ÷–ΦδΒΞΗω‘≤ΜΖΒΡ≥·œρ”ΠœώΆΦ 1a Ρ«―υΖ≈÷ΟΘ§Ές±±≤ΩΥ―Υς“ΐ «φ…œΒΡ‘≤ΜΖΥ≥–ρ”ΠœώΆΦ 7 Ρ«―υΓΘ
3.2 »ϋΧ®
3.2.1 »ϋΧ® «Ϋχ––ΜζΤς»Υ±»»ϋΒΡΒΊΖΫΓΘ
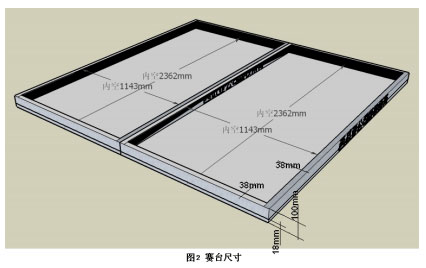
3.2.2 ΒΞΗω»ϋΧ®ΒΡΡΎ≤Ω≥Ώ¥γ≥ΛΈΣ 1143mmΓΔΩμ 2362mmΘ§ΥΡ÷ήΉΑ”–±ΏΩρΘ§ΗΏΈΣ 77mm±13mmΘ§ ΚώΕ»ΈΣ 38mmΘ§»ϋΧ®ΒΉΑεΚώΕ»ΈΣ 18mmΘ§»γΆΦ 2 Υυ ΨΓΘ±ΏΩρΡΎ≤ύΈΣΚΎ…ΪΓΘΉιΉΑΚΟΒΡ»ϋΧ® ±ΏΩρΡΎΗΏΈΣ 77mm±13mmΓΘ
3.3.3 »ϋΧ®ΒΉΑε…œΤΧ”–―«Ιβ≥ΓΒΊΡΛΓΘ≥ΓΒΊΡΛ…œΜ≠”–ΜυΒΊΘ§±»»ϋ”ΟΒΡ≤ΩΖ÷ΡΘ–Ά‘ρ≤Φ÷Ο‘Ύ≥Γ ΒΊΡΛ…œΓΘ≥ΓΒΊΡΛΘ®Κ§ΚΎ±ΏΘ©ΒΡ≥Ώ¥γΈΣ 1140mmΓΔΩμ 2347mmΓΘ≥ΓΒΊΡΛΫτΧυ±±ΟφΚΆΕΪΟφΒΡ ±ΏΩρΓΘ≤Έ»ϋΕ”‘Ύ…ηΦΤΜζΤς»Υ ±±Ί–κ≥δΖ÷ΩΦ¬«ΒΫ≥ΓΒΊΡΛΒΡΈσ≤νΓΘ
3.2.4 ±»»ϋ ±ΝΫ’≈»ϋΧ®±≥ΩΩ±≥Ζ≈‘Ύ“ΜΤπΘ§»γΆΦ 2 Υυ ΨΓΘΝΫ÷ß≤Έ»ϋΕ”Ης’Φ“Μ’≈»ϋΧ®ΓΘ≤Έ»ϋ Ε”‘±Οφœρ»ϋΧ® ±Θ§»ϋΧ®ΉσΈς”“ΕΪΘ§≥ΓΒΊΡΛ…œ”–“ΜΗω±μ ΨΖΫœρΒΡ±ξ÷ΨΓΘ
3.2.5 ≥ΓΒΊ…œΈοΤΖΫœΕύΘ§±»»ϋΤΎΦδΘ§≤Έ»ϋΕ”ΚΆ≤Ο≈–‘±“ΣΙ≤Ά§Έ§ΜΛΚΟ≥Γ…œ÷»–ρΓΘ≤Έ»ϋΕ”Ω… “‘Α―ΜυΒΊΡΎΒ±«Α≤ΜΕ·ΜρΜζΤς»Υ≤Μ”ΟΒΡΈοΤΖΖ≈ΒΫΜυΒΊΆβΘ§÷Μ“Σ’βΗωΕ·Ής≤ΜΨΏ”–»ΈΚΈ≤Ώ¬‘ –‘ΓΘΈοΤΖ“≤Ω…”…»ϋΧ®≈‘ΝΫΟϊΕ”‘±÷°“ΜΡΟ‘Ύ ÷άοΜρΖ≈‘ΎΚ–Ή”άοΓΘ»γ“ρΤδΥϋ‘≠“ρΕχΖ«ΜζΤς»Υ ΒΡΕ·Ής ΙΡΘ–ΆΕœΝ―ΓΔ ß–ßΓΔ“ΤΕ·Μρ±ΜΦΛΜνΘ§»γΙϊΩ…ΡήΘ§≤Ο≈–‘±”ΠΨΓΩλΫΪΥϋΜ÷Η¥ΓΘ
3.3 ΜυΒΊ
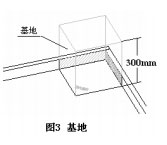
≥ΓΒΊΡΛΒΡΈςΡœΫ«”–“ΜΩιΜυΒΊΓΘΜυΒΊ «≥ΓΒΊΡΛ…œΜυΒΊΕΪΓΔ±± ΝΫΧθ±ΏœΏΚΆ»ϋΧ®ΡœΓΔΈς±ΏΩρΡΎ±μΟφ¥Ι÷±œρ…œ―”…λΚΆ“ΜΗω 300mm ΗΏΒΡ–ιΡβΧλΜ®ΑεΉι≥…ΒΡΖβ±’Ω’ΦδΘ§»γΆΦ 3 Υυ ΨΓΘ»γΙϊ≥ΓΒΊΡΛΒΡ ≥Ώ¥γ”–Έσ≤νΘ®“ΜΑψ «¬‘–ΓΘ©Θ§≤ΜΡή”κ±ΏΩρœύ≈δΘ§‘ρ”≈œ»±Θ÷Λ≥ΓΒΊ ΡΛΒΡΕΪΓΔ±±±Ώ‘Β”κ±ΏΩρΧυΫτΓΘΜυΒΊ «“ΜΗωΩ’ΦδΕχ≤Μ «ΤΫΟφΓΘΜυ ΒΊ «ΜζΤς»ΥΉΦ±ΗΓΔΤτΕ·ΚΆ±Ί“Σ ±Έ§–όΒΡΒΊΖΫΓΘ
3.4 »ΈΈώΡΘ–Ά
±ΨΫΎΒΡΆΦ÷–Θ§’’Τ§±μ ΨΒΡ «ΡΘ–ΆΒΡΖ≈÷ΟΉ¥Χ§ΓΘ
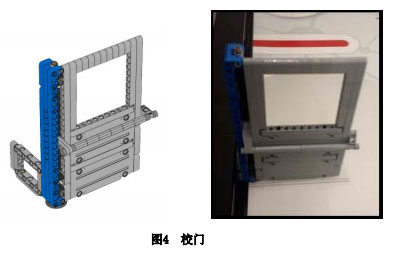
3.4.1 –ΘΟ≈
ΆΦ4±μ Ψ–ΘΟ≈ΒΡΙΊ±’ Ή¥Χ§Θ§Α― ÷œρ…œΘ§Ο≈ « ±’ΥχΒΡΘ§≤ΜΡή«Ω––ΆΤΩΣΓΘ Α¥ΆΦ5ΒΡΧα ΨΫΪ–ΘΟ≈ΡΘ –Ά”ΟΉ”ΡΗΩέΙΧΕ®‘ΎΈς±Ώ «Ϋ÷–≤ΩΒΡ‘≤–Έ«χ”ρΡΎΓΘ
3.4.2 Αθ≥”
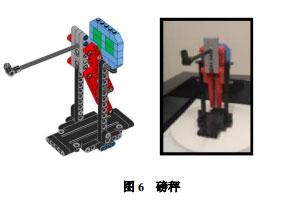
Α¥ΆΦ 6 Υυ Ψ”ΟΉ”ΡΗΩέΑ―Αθ≥”ΡΘ–ΆΙΧΕ®‘Ύ≥Γ ΒΊΡΛΈς±±Ϋ«ΒΡ‘≤–Έ«χ”ρΡΎΓΘ¥ΥΡΘ–Ά”Ο”Ύ―–ΨΩ–‘―ß œΑ»ΈΈώ÷–ΓΘΒ±Αθ≥”ΡΘ–Ά…œΒΡΚΎ…Ϊ…λ≥ωΗΥ…œΙ“Ή≈‘≤ ΜΖ ±Θ§ΡΘ–Ά…œΒΡάΕ…Ϊ–ΓΑεΡή…ΐΤπΓΘ
3.4.3 Υ―Υς“ΐ«φ
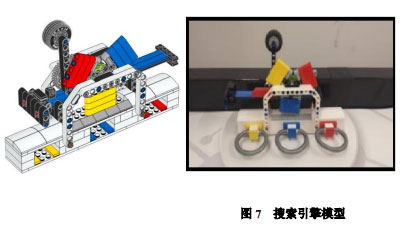
Υ―Υς“ΐ «φΡΘ –Ά”Ο Ή”ΡΗ ΩέΙΧΕ® Αθ ≥” ΕΪ Οφ ΒΡ ‘≤ –Έ «χ ”ρΡΎΘ§Μ§ΑεœρΈςά≠ΒΫΒΉΘ§»γ ΆΦ 7 ”“Υυ ΨΓΘΑΉ…ΪΩρΦή¥ΑΩΎ ΡΎΩ…Φϊ”–…ΪΨΊ–ΈΘ®”–ΚλΓΔάΕΓΔ ΜΤ»ΐ÷÷Θ©ΓΘΡΘ–Άœ¬ΖΫ”–»ΐΗω ≤έ Θ§ ¥” Ήσ ÷Ν ”“ Ζ÷ ±π ≤ε Ή≈ ΜΤ…ΪΓΔάΕ…ΪΓΔΚλ…Ϊ‘≤ΜΖΓΘ
3.4.4 «ρΟ≈
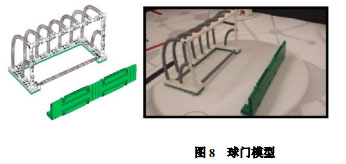
«ρ Ο≈ ΡΘ–Ά Αϋ ά® «ρ Ο≈ ΚΆ Ο≈ «Α ΒΡ ’œ Α≠Θ§”ΟΉ”ΡΗΩέΙΧΕ®‘ΎΥ―Υς“ΐ«φΡΘ–ΆΕΪ ΡœΟφΒΡ‘≤–Έ«χ”ρΡΎΘ§»γΆΦ 8 Υυ ΨΓΘ«ρ ±Ί–κ‘ΫΙΐ’œΑ≠≤≈ΡήΫχ»κ«ρΟ≈ΓΘ¥ΥΡΘ–Ά”Ο”Ύ“‘ΥΕ·”»ΈΈώΘ§Υυ–ηΒΡΉψ«ρΖ≈‘ΎΜυΒΊάοΓΘ
3.4.5 Ή¥Χ§ΡΘ–Ά
Ή¥Χ§ΡΘ–Ά”ΟΉ”ΡΗΩέΙΧΕ®‘Ύ«ρΟ≈ΡœΤΪΈςΒΡ‘≤–Έ«χ”ρΡΎΘ§V –Έ±έΒΡΩΣΩΎœρΡœΘ§ΫτΩΩΉ≈ΒΉΉυ…œΒΡάΕ…Ϊ–ΓΒ≤ΩιΘ§»γΆΦ 9 Υυ ΨΓΘάΕ…ΪΚΆΜΤ…Ϊ–ΓΒ≤Ωι±Θ÷Λ¥ΥΡΘ–Ά÷ΜΡήΡφ ±’κΉΣΕ· 90°ΓΘ

3.4.6 ‘ΦΦϊΡΘ–Ά
‘ΦΦϊΡΘ–Ά”ΟΉ”ΡΗΩέΙΧΕ®‘ΎΉ¥Χ§ΡΘ–ΆΕΪΟφΒΡ‘≤–Έ«χ”ρ÷–Θ§ΜΤ…Ϊ≤Ω ΦΰΩΣ Φ ±…‘œρ±±«ψ–±Θ§±μ≈Χ…œΒΡΑΉ…Ϊ÷Η’κœρΡœΘ§»γΆΦ 10 Υυ ΨΓΘΡΘ –ΆΡœΟφΒΡ≤Π¬÷÷Μ”–ΝΫΗω“ΕΤ§Θ§ΚλΓΔΚΎΗς“ΜΓΘ±»»ϋΩΣ Φ ±Θ§Κλ…Ϊ“ΕΤ§ œρ…œΓΘΑΉ…Ϊ÷Η’κΒΡ≥θ ΦΈΜ÷Ο¬‘ΒΆ”Ύ±μ≈Χ…œΒΡΒΎ“ΜΗωΚλ…ΪΒΟΖ÷ΒψΓΘΜζΤς»ΥΑ―ΜΤ…Ϊ≤ΩΦΰœρΡœΆΤΘ§Ω… ΙΡΘ–Ά÷–ΒΡ“«ρ”≥ί¬÷ΡωΚœΓΘΜζΤς»Υ≤Π Ε·≤Π¬÷Θ§Ω…¥χΕ·±μ≈Χ…œΒΡ÷Η’κΥ≥ ±’κΉΣΕ·ΓΘ

3.4.7 Μζ–Β±έ
‘Ύ‘ΦΦϊΡΘ–ΆΕΪ±±ΒΡ‘≤–Έ«χ”ρ÷–”ΟΉ”ΡΗΩέΡœ±±œρΒΊΙΧΕ®Ή≈Μζ–Β±έΡΘ–ΆΘ§ΡΘ–Ά…œΒΡΚΎ…Ϊ Μ§Αεœρ±±ΒΫΒΉΘ§±έΕΥΒΡ ÷ΉΠ…œœΈΉ≈“ΜΗω‘≤ΜΖΘ§»μΙήœρΆβΘ§―’…Ϊ≤ΜœόΘ§»γΆΦ11Υυ ΨΓΘ
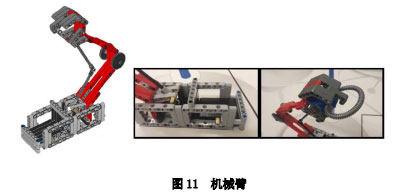
¥ΥΡΘ–Ά”Ο”Ύ“ΜζΤς»ΥΨΚ»ϋ”»ΈΈώΘ§Άξ≥…»ΈΈώΥυ–η“ΣΒΡΜζΤς»Υ≤εΦΰΖ≈‘ΎΜυΒΊ÷–ΓΘ
3.4.8 …γ«χΡΘ–Ά
≥ΓΒΊΕΪΡœΫ«ΒΡ‘≤–Έ«χ”ρ÷–Θ§”ΟΉ”ΡΗΩέΙΧ Ε®Ή≈…γ«χΡΘ–ΆΓΘ‘ΎΡΘ–Ά…œΟφ÷–―κ≤ε»κ“ΜΗω‘≤ ΜΖΘ§―’…Ϊ≤ΜœόΘ§ΥΡΗω≤ύΟφΧßΤπΘ§»γΆΦ 12 Υυ ΨΓΘΑΈΤπ‘≠ΜΖ‘ρΥΡΗω≤ύΟφ¬δœ¬ΓΘ
3.4.9 ‘ΤΕΥΡΘ–Ά
‘ΤΕΥΡΘ–Ά”ΟΉ”ΡΗΩέΙΧΕ®‘Ύ…γ«χΡΘ–ΆΈς±Ώ ΒΡ‘≤–Έ«χ”ρ÷–Θ§±μ Ψ SD Ω®ΒΡ–Γ≤ΩΦΰΥ°ΤΫΓΔœρ ΈςΘ§»γΆΦ 13 Υυ ΨΓΘΡΘ–ΆΒΡΝΫΗωΒ≠άΕ…ΪΧθΉ¥«χ ”ρ”–»ΐΗω≈≈Ν–≥… V Ή÷–ΈΒΡ“‘Ω≥Ή”ΩΉΓΘΆξ≥… “‘ΤΕΥΖΟΈ ”»ΈΈώ ±Θ§‘ΎΡΘ–Ά÷–≤ε»κ’ΐ»ΖΒΡ“‘Ω≥Ή”Θ®Ή‘±ΗΘ©Θ§SD Ω®ΨΆΜα ζΤπΓΘ

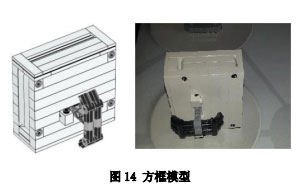
3.4.10 ΖΫΩρΡΘ–ΆΚΆ…ηœκΡΘ–Ά ‘Ύ…γ«χΡΘ–Ά±±ΟφΒΡ‘≤–Έ«χ”ρ÷–Ζ≈Ή≈≤ΜΙΧΕ®ΒΡΑΉ…ΪΖΫΩρΡΘ–ΆΘ§ΡΘ–Ά…œΒΡΚΎ…Ϊ≤ΩΦΰ œρ±±Θ§»γΆΦ 14 Υυ ΨΓΘΖΫΩρΡΘ–Ά÷–≤ε”–“ΜΩι ¥χΜΤ…ΪΒΤ≈ίΉ¥ΆΦ–ΈΒΡ…ηœκΡΘ–ΆΘ®≥·œρΡœΟφΘ§ ΑΉ…Ϊ±ΏΧθœρΈςΘ§ΉΔ“βΡΘ–ΆΆβ 4 ΗωΚΎΒψΒΡΈΜ
÷ΟΘ©ΓΘ¥ΥΡΘ–Ά”Ο”Ύ“ΆΜΤΤ–‘ΥΦΈ§”»ΈΈώΓΘ
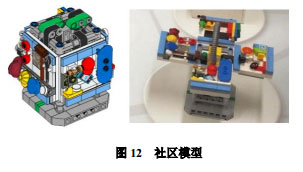
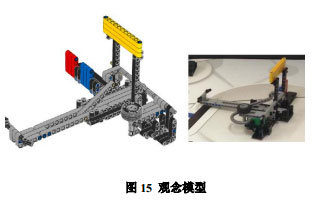
3.4.11 ΙέΡνΡΘ–Ά ΙέΡνΡΘ–Ά”ΟΉ”ΡΗΩέΙΧΕ®‘Ύ≥ΓΒΊΕΪ±±Ϋ«ΒΡ‘≤–Έ«χ”ρ÷–Θ§Μ§ΑεœρΈςΘ§Φ–≥÷Τς÷–ΩέΉΓ “ΜΗω‘≤ΜΖΘ§―’…Ϊ≤ΜœόΘ§»μΙήœρΆβΘ§»γΆΦ 15 Υυ ΨΓΘ‘≤ΜΖ‘ΎΦ–≥÷Τς÷–Ω…ΡήΜΈΕ·Θ§…η÷ΟΡΘ –Ά ±≤ΜΩ…ΡήΑ¥ΟΩΗω≤Έ»ϋΕ”ΒΡ“Σ«σΑ―‘≤ΜΖΖ≈ ΒΫΧΊΕ®ΒΡΈΜ÷ΟΘ§“ρ¥ΥΜζΤς»ΥΒΡ≤Ώ¬‘”ΠΦθ…Ό Μρœϊ≥ΐ’β÷÷≤Μ»ΖΕ®“ρΥΊΒΡ”ΑœλΓΘ
3.4.12
œύΜζ”κœ‘ ΨΤςΡΘ–Ά
’β «“ΜΉιΡΘ–ΆΘ§Αϋά®“ΜΗωœ‘ ΨΤςΡΘ–ΆΓΔ“ΜΗωœύΜζΡΘ–ΆΓΔΝΫΗωΒΦ¬÷ΓΔ“ΜΗυœΗ…ΰΓΘœ‘ Ψ ΤςΡΘ–ΆΙΧΕ®‘Ύ»ϋΧ®±±±Ώ«Ϋ÷–≤ΩΘ§œύΜζΡΘ–ΆΙΧΕ®‘ΎΙέΡνΡΘ–ΆΡœΤΪΈςΒΡ‘≤–Έ«χ”ρ÷–Θ§Εΰ’ΏΆ® ΙΐœΗ…ΰœύΝ§ΓΘΈΣΝΥ“ΐΒΦœΗ…ΰΒΡ‘ΥΕ·Θ§‘ΎΕΪ±Ώ«Ϋ÷–≤ΩΤΪ±±ΦΑ≥ΓΒΊΕΪ±±Ϋ«ΒΡ±Ώ«Ϋ…œΗς’≥”–“Μ
ΗωΒΦ¬÷ΜζΙΙΘ§»γΆΦ 16 Υυ ΨΓΘ ΡΘ–ΆΒΡΑ≤ΉΑ“Σ±Θ÷ΛΝΫΕ”ΕΦ‘ΎœύΜζΕΥά≠Ε·œΗ…ΰΚσΘ®≤Μ“ΜΕ®Ά§ ±Θ©Θ§œ‘ ΨΤςΒΡΤΝΡΜΡήΉ‘»γΧßΤπΓΘ±»»ϋΩΣ Φ«ΑΘ§œ‘ ΨΤςΡΘ–ΆΝΫ±ΏΒΡΜ“…ΪΝΚΗςœρΥΪΖΫ≥ΓΒΊΡœΖΫ’≈ΩΣΘ§”…ΗςΉ‘œ¬ΖΫΒΡ ΚΎ…ΪΝΔ÷υ÷ß≥≈Θ§œ‘ ΨΤςΒΡΤΝΡΜ≥ Υ°ΤΫΉ¥Χ§ΓΘΫΪœύΜζΡΘ–ΆΒΡΚλ…ΪΜ§ΑεœρΈςά≠Θ§Ά®ΙΐœΗ…ΰά≠ Ε·œ‘ ΨΤςΡΘ–Ά…œΒΡΚΎ…ΪΝΔ÷υΘ§Μ“…ΪΝΚ ß»Ξ÷ß≥≈¥Ι¬δΓΘ÷Μ”–‘ΎΝΫ±ΏΒΡΜ“…ΪΝΚΨυ¥Ι¬δ ±Θ§œ‘ ΨΤςΒΡΤΝΡΜ≤≈Ρή ζΤπΓΘ
3.4.13 ΜυΒΊ÷–ΒΡΡΘ–Ά
1Ηω«ρΓΔ8Ηω¥ΠΖΘΡΘ–ΆΓΔ1Ηω‘≤ΜΖΘ®―’…Ϊ≤ΜœόΘ§Νμ7Ηω‘≤ΜΖΘ§3Ηω‘ΎΥ―Υς“ΐ«φΡΘ–Ά…œΘ§1 Ηω‘ΎΜζ–Β±έΡΘ–Ά…œΘ§1Ηω‘ΎΙέΡνΡΘ–Ά…œΘ§1Ηω‘Ύ…γ«χΡΘ–Ά…œΘ§1ΗωΖ≈‘Ύ≥ΓΒΊΡΛΡœΟφ÷–≤ΩΘ©ΓΔ “ΜΧΉΈ¥¥νΫ”ΒΡ6Ηω‘ΣΦΰΘ®≤Ο≈–ΜαΑ―”κ÷°œύΆ§ΒΡΝμ“ΜΧΉΫΜΗχΕ‘ΖΫΘ©ΓΔ2Ηω–Γ»ΥΦΑάΕ/ΜΤ/Κλ…Ϊ≤ε ΦΰΥ……ΔΒΊΖ≈‘ΎΜυΒΊάοΘ§ΆΦ17Υυ ΨΓΘ

3.5 »ϋ≥ΓΜΖΨ≥
ΜζΤς»Υ±»»ϋ≥ΓΒΊΜΖΨ≥ΈΣάδΙβ‘¥ΓΔΒΆ’’Ε»ΓΔΈό¥≈≥ΓΗ…»≈Θ§ΒΪ”…”Ύ“ΜΑψ»ϋ≥ΓΜΖΨ≥ΒΡ≤Μ»Ζ Ε®“ρΥΊΫœΕύΘ§άΐ»γΘ§≥ΓΒΊΡΛœ¬Οφ”–ΈΤ¬ΖΚΆ≤ΜΤΫ’ϊΘΜ≥ΓΒΊΡΛ±Ψ…μ”–÷εώόΘΜ≥Ώ¥γ”–Έσ≤νΘΜ±Ώ Ωρ…œ”–Ν―ΖλΘΜΙβ’’ΧθΦΰ”–±δΜ·ΘΜ»»ΓΘ≤Έ»ϋΕ”‘Ύ…ηΦΤΜζΤς»Υ ±”ΠΩΦ¬«Ης÷÷”ΠΕ‘¥κ ©ΓΘ
4 ΜζΤς»ΥΚΆΤς≤Ρ
±ΨΫΎΧαΙ©…ηΦΤΚΆΙΙΫ®ΜζΤς»ΥΒΡ‘≠‘ρΚΆ Ι”ΟΤς≤ΡΒΡ“Σ«σΓΘΜζΤς»Υ‘Ύ±»»ϋ÷–Ω…“‘Άξ≥…ΧΊ Ε®ΒΡ»ΈΈώΓΘ≤Έ»ϋ«ΑΘ§Υυ”–ΜζΤς»Υ±Ί–κΆ®ΙΐΦλ≤ιΓΘ
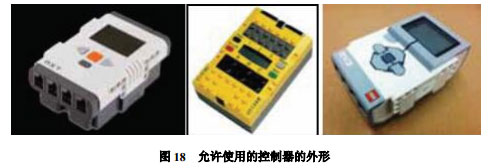
4.1 ≤Έ»ϋΒΡΜζΤς»Υ÷Μ‘ –μ Ι”Ο“ΜΗω LEGO NXT Μρ RCX Μρ EV3 ΩΊ÷ΤΤςΘ§ΥϋΟ«ΒΡΆβ–Έ»γΆΦ18 Υυ ΨΓΘΑ≤ΉΑΖΫΖ®Ω…“‘ «―ΙΉΑΜρΥ…≈δΚœΓΘΆ―άκΜζΤς»ΥΒΡΈοΧε≤Μ τ”ΎΜζΤς»ΥΒΡ“Μ≤ΩΖ÷ΓΘ±ΜΜζΤς»Υ–·¥χΜρ”κΜζΤς»ΥΫ”¥ΞΒΡ≤Ώ¬‘ΈοΤΖΩ…“‘Β±≥… «ΜζΤς»ΥΒΡ“Μ≤ΩΖ÷ΓΘ
4.2 ΨΚ»ϋ”ΟΒΫΒΡΟΩ÷÷Τς≤Ρ±Ί–κ Ι”Ο‘≠ Φ≥ω≥ßΉ¥Χ§ΒΡ LEGO ‘ΣΦΰ÷ΤΉςΘ§ΒΦœΏΚΆ»μΙήΩ…“‘Φτ ≥…–η“ΣΒΡ≥ΛΕ»ΓΘ
4.3 ≥ΐ≤Μ‘ –μ”ΟΖΔΧθ/ΜΊΝΠ“¬μ¥ο”ΆβΘ§Ε‘Ζ«ΒγΤχ LEGO ‘ΣΦΰΒΡ ΐΝΩΦΑά¥‘¥ΟΜ”–œό÷ΤΓΘΤχ Ε·‘ΣΦΰ «‘ –μΒΡΓΘ
4.4 Υυ”ΟΒΡΒγΤχ‘ΣΦΰ±Ί–κΈΣ LEGO …ζ≤ζΒΡ’ΐΙφ MINDSTORMS –Ά‘ΣΦΰΓΘ≤Έ»ϋ±®ΟϊΫα χΚσΘ§ ≤ΜΖϊΚœ¥Υ“Σ«σΒΡ≤Έ»ϋΕ”Μα±Μ»Γœϊ≤Έ»ϋΉ ΗώΓΘ±»»ϋ ±Θ§Ζ≤ «ΉιΈ·Μα≤ΜΡή»œΕ®ά¥‘¥ΒΡΤς≤ΡΘ§ ≤Έ»ϋΕ””ΠΧαΙ©≤…ΙΚΚœΆ§ΓΔΖΔΤ±Β»ΈΡΦΰΘ§÷ΛΟςΥυ”ΟΒΡΤς≤Ρά¥Ή‘’ΐΙφ«ΰΒάΓΘΉιΈ·Μα”–»®Ε‘ά¥ Ή‘Ζ«’ΐΙφ«ΰΒάΒΡΤς≤ΡΉω≥ωœύ”ΠΒΡ¥ΠάμΓΘ
4.5 ‘ –μ≤Έ»ϋΕ”ΉνΕύ÷Μ Ι”ΟΥΡΗωLEGO MINDSTORMSΒγΜζΓΘάΐ»γΘ§»γΙϊΡψΒΡΜζΤς»Υ…œ”– ΥΡΗωΒγΜζΘ§ΨΆ≤ΜΡή‘ΌΑ―ΤδΥϋΒγΜζ¥χΒΫ±»»ϋ«χΘ§Φ¥ ΙΗΟΒγΜζ÷Μ «”Ο”Ύ≈δ÷ΊΜρΉΑ ΈΜρΖ≈‘Ύ≥Γ ΆβΒΡΚ–Ή”άοΓΘ‘Ό»γΘ§»γΙϊΡψΒΡΜζΤς»Υ…œ”–»ΐΗωΒγΜζΘ§ΒΪ «Ρψ”–ΕύΗωΗΫ τΉΑ÷Ο“Σ”ΟΒγΜζ¥χ Ε·Θ§Ρψ±Ί–κ…ηΦΤ“Μ÷÷ΖΫΖ®ΫΪΒΎΥΡΗωΒγΜζ¥”“ΜΗωΗΫ τΉΑ÷Ο»Γ≥ω―ΗΥΌΉΑΒΫΝμ“ΜΉΑ÷Ο÷–ΓΘΆΦ19 Ψ≥ωΝΥ‘ –μ Ι”ΟΒΡΒγΜζΒΡΆβ–ΈΓΘ

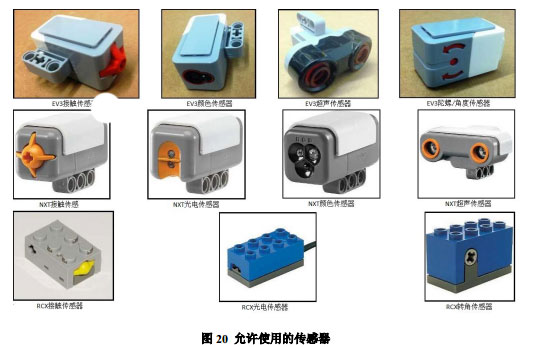
4.6 Ε‘ Ι”ΟΒΡ¥ΪΗ–Τς ΐΝΩΟΜ”–œό÷ΤΓΘΒΪ÷ΜΡή Ι”ΟΫ”¥ΞΓΔΙβΒγΓΔ―’…ΪΓΔΉΣΫ«ΓΔ≥§…υΜρΆ”¬ί/ Ϋ«Ε»¥ΪΗ–ΤςΓΘ“ΣΉΔ“βΒΡ «Θ§LEGO Ή®¬τΒξœζ έΒΡΜρΧυ”– LEGO ±ξ÷ΨΒΡ¥ΪΗ–Τς≤Μ“ΜΕ® «LEGO …ζ≤ζΒΡΓΘ‘ –μ Ι”ΟΒΡ¥ΪΗ–ΤςΒΡΆβ–Έ»γΆΦ 20 Υυ ΨΓΘ
4.7 LEGO ΒΦœΏΚΆΉΣΫ”œΏΩ…“‘Υφ“β Ι”ΟΓΘ
4.8 ‘ΎΉΦ±Η«χΩ…“‘”–±ΗΖί/ΧφΜΜΒΡΒγΤχ‘ΣΦΰΓΘ
4.9 ≤Μ‘ –μΫΪΦΤΥψΜζ¥χ»κ±»»ϋ«χΓΘ≤ΜΡή‘Ύ±»»ϋ«χΡΎΗχΜζΤς»Υœ¬‘Ί≥Χ–ρΘ§Ω…“‘‘ΎΉΦ±Η«χ÷– Ϋχ––ΓΘ
4.10 Έό¬έ‘ΎΚΈ¥ΠΘ§≤Μ‘ –μ Ι”Ο”–“ΘΩΊΙΠΡήΒΡΈοΤΖΓΘ
4.11 ÷Μ‘ –μ‘ΎΜζΤς»ΥΒΡ≤ΜΆβ¬ΕΈΜ÷Ο Ι”Ο±φ±π…μΖίΒΡ±ξΦ«ΓΘ
4.12 ≤Μ‘ –μ Ι”Ο”ΆΤαΓΔΫΚ¥χΓΔ’≥ΚœΦΝΓΔ»σΜ§ΦΝΓΔ‘ζΫτ¥χΒ»ΓΘ
4.13 ≥ΐΝΥΩ…Α¥ LEGO ΥΒΟς ι Ι”Ο LEGO ΒΡ≤ΜΗ…ΫΚ±ξ«©ΆβΘ§ΤδΥϋ±ξ«©Ψυ≤ΜΩ… Ι”ΟΓΘ
4.14 ΉΔ“βΘ§‘ΎΒΞ≥Γ±»»ϋ÷– Ι”ΟΕύΧ®ΜζΤς»Υ «ΈΞΙφΒΡΘ§ΒΪ «Θ§‘Ύ≤ΜΆ§≥Γ¥ΈΒΡ±»»ϋ÷–Ω… Ι”Ο ≤ΜΆ§ΒΡΜζΤς»ΥΓΘ
4.15 »γΙϊΜζΤς»ΥΈΞΖ¥±ΨΙφ‘ρ«“ΈόΖ®Ψά’ΐΘ§≤Ο≈–≥ΛΩ…“‘ΨωΕ®Υϋ»γΚΈ≤Έ»ϋΘ§ΒΪ¥ΥΜζΤς»Υ≤ΜΡή ΜώΫ±ΓΘ
4.16 Ω…“‘ Ι”Ο LEGO MINDSTORMSΓΔRoboLabΓΔNXT-G Μρ EV3 »μΦΰΘ®»ΈΚΈ“―ΖΔ≤ΦΒΡ Αφ±ΨΘ©ΗχΜζΤς»Υ±ύ≥ΧΓΘ‘ –μ Ι”Ο”…÷Τ‘λ…ΧΘ®LEGO ΚΆ NI ΙΪΥΨΘ©ΧαΙ©ΒΡ≤ΙΕΓΓΔ≤εΦΰΚΆ–¬ Αφ±Ψ»μΦΰΓΘ≤Μ‘ –μ Ι”ΟΙΛΨΏΑϋΘ®LabVIEWΘ©ΓΔΜυ”ΎΈΡ±ΨΒΡ±ύ≥Χ»μΦΰΜρ“Άβ≤Ω”»μΦΰΓΘ
5 »ΈΈώΥΒΟς
5.1 ±ΨΫΎΙφΕ®ΝΥΜζΤς»Υ“ΣΆξ≥…ΒΡ 14 ÷÷»ΈΈώΓΘ’βάοΥυΥΒΒΡΜζΤς»Υ”ΠΖϊΚœ 4.1 ΒΡ“Σ«σΓΘΡ≥–© »ΈΈώ”–ΝΫΗω“‘…œ”Ο“Μρ”Ν§‘Ύ“ΜΤπΒΡΒΟΖ÷ΧθΦΰΘ§Ε‘”Ύ»ΈΈώΥυ…φΦΑΒΡΡ≥ΗωΡΘ–Άά¥ΥΒΘ§Υϋ≤Μ Ω…ΡήΦ»¬ζΉψ’βΗωΒΟΖ÷ΧθΦΰΘ§”÷¬ζΉψΡ«ΗωΒΟΖ÷ΧθΦΰΘ§÷ΜΡήΒΟΒΫ“ΜΗωΖ÷ ΐΘΜ”–ΒΡ»ΈΈώ”–ΝΫ÷÷ ”Ο“ΦΑ”Ν§‘Ύ“ΜΤπΒΡΒΟΖ÷ΧθΦΰΘ§ΥϋΟ« «ΕΰΚœ“ΜΒΡΘ§”–Ω…Ρή±ΜΆ§ ±¬ζΉψΘ§ΒΟΒΫΝΫΗωΖ÷ ΐΓΘ ≥ΐΧΊ±πœόΕ®ΝΥΖΫΖ®ΒΡ»ΈΈώΆβΘ§Άξ≥…ΤδΥϋ»ΈΈώΒΡΖΫΖ®≤Μ ήœό÷ΤΓΘ
5.2 ΙφΕ®ΒΡ»ΈΈώ
Δ≈ ΩΣΟ≈Αλ―ßΘ®œόΕ®ΖΫΖ®Θ© ΜζΤς»Υ÷ΜΡή”Οœρœ¬ΆΤΟ≈Α― ÷ΒΡΖΫΖ® Ι–ΘΟ≈¥ρΩΣΒΟΉψΙΜ¥σΘ§»Ο≤Ο≈–ΡήΩ¥ΒΟΒΫΘ®≤ΟΨω±ξΉΦΘΚ–ΘΟ≈”κΈς±Ώ«ΫΒΡΦ–Ϋ«≤Ω¥σ”Ύ 45°Θ©ΓΘ
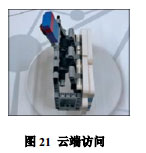
ΔΤ ‘ΤΕΥΖΟΈ Θ®œόΕ®ΖΫΖ®Θ© ΜζΤς»ΥΑ―’ΐ»ΖΒΡ“‘Ω≥Ή”≤ε»κ‘ΤΕΥΡΘ–ΆΘ§ Ι SD Ω® ζΤπΓΘΒΟΖ÷Ή¥Χ§»γΆΦ 21 Υυ ΨΓΘ “‘Ω≥Ή” «≤Έ»ϋΕ”Ή‘ΦΚ…ηΦΤΓΔΉ‘¥χΒΡ≤Ώ¬‘ΈοΤΖΓΘSD Ω® ζΤπΚσΘ§“‘Ω≥Ή”Ω…“‘Ντ‘ΎΡΘ–Ά…œΜρ≥ΓΒΊ…œΘ§Οβ”ΎΕΣΤζ¥ΠΖΘΓΘ
Δ« …γ«χ―ßœΑ
ΜζΤς»ΥΑΈΤπ…γ«χΡΘ–Ά…œ±μ Ψ÷Σ Ε”κΦΦΡήΒΡ‘≤ΜΖΘ§ Ι÷°≤Μ‘Ό”κ…γ«χΡΘ–ΆΫ”¥ΞΓΘ
Δ» ΜζΤς»ΥΨΚ»ϋΘ®œόΕ®ΖΫΖ®Θ© ΜζΤς»Υ”ΠΑ―ΜυΒΊ÷–ΒΡ≤εΦΰΉΑΒΫΆΦ22Υυ ΨΒΡΒΊΖΫΘ§≤Δ÷ΜΡή”Ο Ι≤εΦΰœ¬ΟφΜ§Αε‘ΥΕ·ΒΡΖΫΖ® ΆΖ≈‘≤ΜΖ«“ ΙΥϋ ≤Μ‘Ό”κΜζ–Β±έΡΘ–ΆΫ”¥ΞΘ§≤Έ»ϋΕ”ΒΡΈοΤΖ≤Μ”κ≤εΦΰΫ”¥ΞΓΘ

Δ… άϊ”Ο’ΐ»ΖΒΡΙέΡνΘ®œόΕ®ΖΫΖ®Θ© ΜζΤς»Υ÷ΜΡή ΙΙέΡνΡΘ–Ά…œΒΡΜ§Αε‘ΥΕ· ΆΖ≈‘≤ΜΖΘ§ Ι÷°≤Μ‘Ό”κΙέΡνΡΘ–ΆΫ”¥ΞΓΘ“ΣΉΔ“βΘ§ ΆΖ≈Ρ≥ΗωΈοΤΖ «»ΟΥϋ‘ΥΕ·Μρ±Μ»ΓΉΏΘ§≤Μ «“Β·≥ω”ΓΘ
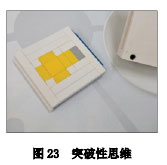
Δ ΆΜΤΤ–‘ΥΦΈ§Θ®œόΕ®ΖΫΖ®Θ© ΜζΤς»Υ”Π Ι…ηœκΡΘ–ΆΆξ»Ϊ‘ΎΖΫΩρΡΘ–Ά÷°Άβ≤Δ≤Μ‘Ό”κΖΫΩρΡΘ–ΆΫ”¥ΞΓΘ»γΙϊ…ηœκΡΘ–ΆΒΡΒΤ≈ίΟφœρ…œΘ§»γΆΦ 23 Υυ ΨΘ§‘ρΡήΕύ ΒΟΖ÷ΓΘ»γΙϊΒΤ≈ίΟφ≥·œρ≤ύΖΫΘ§“≤Υψ «≥·…œΓΘ‘ΎΆξ≥…¥Υ»ΈΈώΒΡΙΐ ≥Χ÷–Θ§ΖΫΩρΡΘ–Ά≤ΜΒΟ“‘»ΈΚΈΖΫ ΫΜΊΒΫΜυΒΊΓΘ“‘…œΒΡΥΒΟς≤Δ≤Μ»œ ΈΣ…ηœκΡΘ–Ά «ΖΫΩρΡΘ–ΆΒΡ“Μ≤ΩΖ÷ΓΘ
ΔΥ ‘Ε≥ΧΫΜΝς/―ßœΑΘ®œόΕ®ΖΫΖ®Θ© ’β «“ΜΗωΚœΉς»ΈΈώΓΘΝΫΕ”ΒΡΜζΤς»Υά≠Ή‘ΦΚ≥ΓΒΊ…œœύΜζΡΘ–ΆΒΡΜ§Αε ΙΥϋœρΈς‘ΥΕ·Θ§œ‘ ΨΤςΒΡΤΝΡΜΧßΤπΘ§ΝΫΕ”ΨυΒΟΖ÷ΓΘ”…”ΎΝΫΕ”≤Μ“ΜΕ®ΚœΉςΘ§Άξ≥…’βΗω»ΈΈώ≤Μ“Σ«σ–Έ≥…ΒΟΖ÷Ή¥ Χ§Θ§≤Ο≈–‘±÷Μ“ΣΩ¥ΒΫΡ≥“ΜΕ”ΒΡΜζΤς»Υ»Ζ ΒΑ―œύΜζΡΘ–ΆΒΡΜ§ΑεœρΈςά≠«“œ‘ ΨΤςΡΘ–Ά…œ±ΨΕ” “Μ≤ύΒΡΚΎ…Ϊ÷ß≥≈ΗΥ≤Μ‘ΌΤπ÷ß≥≈Ής”ΟΘ§ΗΟΕ”ΨΆΩ…“‘ΒΟΖ÷ΓΘ
–η“ΣΉΔ“βΒΡ «Θ§Ε‘Άξ≥…»ΈΈώΖΫΖ®ΒΡΙφΕ® «“ΜζΤς»Υά≠ Μ§Αε”Θ§’βΨΆ «ΥΒΘ§±Ί–κ ΙΜ§ΑεœρΜζΤς»Υ“ΤΕ·Θ§¥”≈‘≤ΠΕ· Μ§ΑεΜρΆΤΕ·Μ§Αε≤Μ «’ΐ»ΖΒΡΖΫΖ®ΓΘ

ΔΧ άϊ”ΟΥ―Υς“ΐ«φΘ®œόΕ®ΖΫΖ®Θ©
ΜζΤς»Υ ΙΥ―Υς“ΐ«φΡΘ–Ά…œΒΡάΕ…ΪΜ§ΑεœρΕΪ‘ΥΕ·Θ®Ε·ΝΥΕύ…Ό≤Δ≤Μ÷Ί“ΣΘ©Θ§ Ι¥χ»ΐΗω…Ϊ ΩιΒΡΉΣ¬÷÷Ν…ΌΉΣΕ·“Μ÷ήΓΘ»γΙϊ‘ΎΑΉ…ΪΩρΦή÷–≥ωœ÷Ρ≥ΗωΆξ’ϊΒΡ…ΪΩιΘ§ΜζΤς»Υ÷Μ»Ο”κΗΟ…Ϊœύ ≈δΒΡ‘≤ΜΖ≤Μ‘Ό”κ“ΐ«φΡΘ–ΆΫ”¥ΞΘ§»γΆΦ 24 Υυ ΨΘΜΜρ’ΏΘ§»γΙϊ‘ΎΑΉ…ΪΩρΦήΆβ≥ωœ÷Ρ≥ΗωΆξ’ϊ ΒΡ…ΪΩιΘ§ΜζΤς»Υ÷Μ»Ο”κΗΟ…Ϊœύ≈δΒΡ‘≤ΜΖ≤Μ‘Ό”κ“ΐ«φΡΘ–ΆΫ”¥ΞΘΜΜρ’ΏΘ§»γΙϊ‘ΎΑΉ…ΪΩρΦή÷– ≥ωœ÷Ρ≥ΗωΆξ’ϊΒΡ…ΪΩι«“‘ΎΑΉ…ΪΩρΦήΆβ≥ωœ÷Νμ“ΜΗωΆξ’ϊΒΡ…ΪΩιΘ®Υδ»ΜΘ§’β «≤ΜΧΪΩ…Ρή≥ωœ÷ ΒΡ«ιΩωΘ©Θ§ΜζΤς»Υ÷Μ»Ο”κ’βΝΫΗω…ΪΩιœύ≈δΒΡΝΫΗω‘≤ΜΖ÷–ΒΡ»ΈΚΈ“ΜΗω≤Μ‘Ό”κ“ΐ«φΡΘ–ΆΫ”¥ΞΓΘ ‘Ύ…œ ω»ΐ÷÷«ιΩωœ¬Θ§‘ΎΥ―Υς“ΐ«φΡΘ–ΆΒΡΩΉ÷–Ψυ”ΠΝτœ¬ΝμΝΫΗω‘≤ΜΖΓΘ
ΔΆ ‘ΥΕ·Θ®œόΕ®ΖΫΖ®Θ© ΜζΤς»Υ±Ί–κΆξ»Ϊ‘Ύ“…δΟ≈œΏ”Θ®ΦϊΆΦ25Θ©ΒΡΕΪ/±±Οφ…δΟ≈Θ§«ρ‘ΫΙΐΟ≈«ΑΒΡ’œΑ≠Ϋχ»κ«ρΟ≈Θ§…δΟ≈Ω…“‘ΒΟΖ÷Θ§»γΙϊΑ―«ρΥΆ»κ«ρΟ≈ Ι«ρ”κ«ρΟ≈÷–ΒΡ≥ΓΒΊΡΛΫ”¥ΞΘ®Φ¥Ϋχ«ρΘ©Θ§ ‘ρΒΟΖ÷ΗϋΗΏΓΘΥφΉ≈«ρ”κΥϋ‘ΥΕ·ΒΡΒΊΖΫΆ―άκ Ϋ”¥ΞΘ§“Α―«ρΥΆ»κ«ρΟ≈”ΒΡΙΐ≥ΧΨΆΫα χΝΥΓΘ Ά―άκΫ”¥Ξ ±Θ§…δΟ≈œΏΨΆΈό–η‘ΌΩΦ¬«ΝΥΓΘ
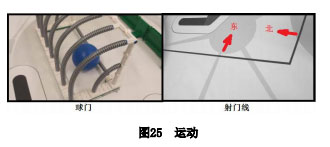
»γΙϊ…δΟ≈Ϋα χΒΪΈ¥Ϋχ«ρΘ§‘Ύ≥ΓΒΊΡΛ…œΒΡ«ρΩ…“‘ΡΟ≥ω≥ΓΆβΘ§“‘Οβ”ΑœλΜζΤς»ΥΒΡ‘ΥΕ·ΓΘ
ΔΈ Ζ¥«σΙΛ≥Χ
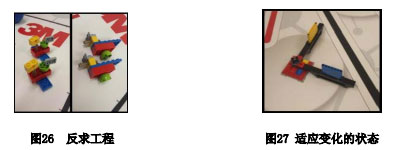
≤Έ»ϋΕ”‘Ύ±»»ϋΩΣ Φ«Α“Σ”Ο≤Ο≈–‘±ΗχΒΡ“ΜΧΉΘ®6ΗωΘ©‘ΣΦΰ¥νΫ”“ΜΗω–ΓΡΘ–ΆΖ≈‘ΎΕ‘ ÷≥Γ ΒΊ…œΒΡάΚΉ”άοΘ®’βΜα–η“Σ“ΜΒψ ±ΦδΘ§ΒΪ±»»ϋΒΡΉΦ±Η ±Φδ≤ΜΜα“ρ¥ΥΕχ―”≥ΛΘ©ΓΘ±»»ϋΩΣ ΦΚσΘ§ ΜζΤς»ΥΑ―Ε‘ ÷Ζ≈‘Ύ±ΨΕ”άΚΉ”÷–ΒΡΡΘ–ΆΝ§άΚΉ”“ΜΤπΡΟΜΊΜυΒΊΘ§≤Έ»ϋΕ”‘±”ΟΉ‘ΦΚ‘ΎΜυΒΊ÷–ΒΡ “ΜΧΉΘ®6ΗωΘ©‘ΣΦΰ¥νΫ”“ΜΗω”κΕ‘ ÷ΡΘ–Ά“Μ―υΒΡΘ®¥νΫ”œύΆ§Θ§Ω…ΉΣΕ·ΒΡ‘ΣΦΰΒΡΖΫœρ“ΣΫ”ΫϋΘ© –ΓΡΘ–ΆΘ§»γΆΦ26Υυ ΨΓΘ
Ε‘’βΗω»ΈΈώ”–“ΜΗωΩμΥ…ΒΡΙφΕ®ΘΚ»γΙϊΜζΤς»Υ¥χάΚΉ”ΚΆ–ΓΡΘ–ΆΜΊΜυΒΊΒΡΙΐ≥Χ÷–Θ§–Γ ΡΘ–ΆΒΡ≤ΩΖ÷Μρ»Ϊ≤ΩΘ®ΉΔ“βΘ§≤Μ «άΚΉ”ΘΓΘ©»ω‘ΎΆΨ÷–Θ§Ω…”Ο ÷Α―ΥϋΡΟΜΊΜυΒΊΘ§ΒΪ±Ί–κ–Γ–Ρ ±ήΟβΫ”¥Ξ±πΒΡΈοΤΖΚΆΜζΤς»ΥΓΘ
Δœ ”Π±δΜ·ΒΡΉ¥Χ§ ΜζΤς»Υ“Σ»ΟΉ¥Χ§ΡΘ–Ά¥”Τδ…ηΕ®ΈΜ÷ΟΡφ ±’κΉΣΕ·90°Θ§»γΆΦ27Υυ ΨΓΘ ¥ΥΡΘ–Ά≤Δ≤ΜΡή±Θ÷ΛΉΣΕ·ΒΡ90° «ΉΦ»ΖΒΡΘ§ΗυΨί≤Ο≈–ΒΡ≈–ΕœΘ§÷Μ“ΣΫ”Ϋϋ90°ΨΆΥψΆξ≥…ΝΥΓΘ’βΗωΡΘ–Ά±»Ϋœ ¥ύ»θΘ§»γΙϊ‘ΎΉΣΕ· ±ΥιΝ―ΒΪ»‘ΡήΦϊΒΫΒΟΖ÷Ή¥Χ§Ω…“‘ΒΟ Ζ÷ΘΜΦϊ≤ΜΒΫΒΟΖ÷Ή¥Χ§ΨΆ≤ΜΡήΒΟΖ÷ΓΘΥιΝ―ΒΡΡΘ–Ά≤Μ‘ΌΜ÷Η¥ΓΘ
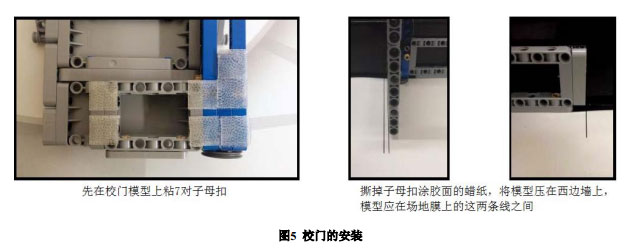
Δ– Αί Π―ß“’

ΜζΤς»Υ“ΣΑ―ΜυΒΊ÷–ΒΡΝΫΗω–Γ»ΥΡΘ–Ά”κ“ΜΗω”Ο≤Έ»ϋΕ”Ή‘ΦΚΒΡLEGO‘ΣΦΰ…ηΦΤΓΔ÷ΤΉςΒΡ –ΓΡΘ–ΆΫαΚœΤπά¥Θ§≤Δ”κΑθ≥”Υυ‘ΎΒΡΑΉ…Ϊ‘≤–Έ«χ”ρΫ”¥ΞΓΘ‘ΎFLLΧτ’Ϋ»ϋ÷–“ΜΑψ «≤Μ‘ –μ≤Έ »ϋΕ”Ή‘¥χΡΘ–ΆΚΆΑ―ΦΗΗωΡΘ–ΆΫαΚœ‘Ύ“ΜΤπΒΡΘ§’β¥Έ «“ΜΗωάΐΆβΓΘ’βΗωΡΘ–Ά”ΠΖ¥”≥Ε‘≤Έ»ϋΕ” ”–“β“εΒΡ≤≈ΡήΓΔ≥…ΨΆΓΔ ¬“ΒΜρ–Υ»ΛΘ§ΡΘ–ΆΩ…“‘ΦρΒΞΜρΗ¥‘”Θ§¥÷¬ΣΜρ±Τ’φΓΘ≤Έ»ϋΕ”Ω…“‘¥χ Ή≈“―ΉωΚΟΒΡ–ΓΡΘ–ΆΫχ»κ±»»ϋ«χΘ§≤Δ‘Ύ»ϋ«ΑΒΡΉΦ±Η ±ΦδΡΎΨΆΩ…“‘Α―ΜυΒΊάοΒΡ–Γ»ΥΡΘ–ΆΫαΚœΒΫΉ‘ΦΚΒΡΡΘ–Ά…œΘ§»γΙϊ≤Έ»ϋΕ”ΆϋΦ«‘ΎΡΘ–Ά…œΦ”–Γ»ΥΘ§»‘»ΜΩ…“‘ΒΟΒΫ÷ΤΉςΡΘ–ΆΒΡΖ÷ ΐΓΘ –η“ΣΉΔ“βΒΡ «Θ§…œΟφΥυΥΒΒΡ «“ΑΉ…Ϊ‘≤–Έ«χ”ρ”Θ§≤Μ «‘≤»ΠΘ§“ρ¥ΥΘ§ΡΘ–Ά÷Μ”κΗΟ«χ”ρΒΡ±ΏœΏΫ”¥Ξ ±≤ΜΖϊΚœ“Σ«σΒΡΓΘ
Δ― ―–ΨΩ–‘―ßœΑ
Αθ≥”ΡΘ–Ά…œ”Π≥÷”–±μ Ψ÷Σ ΕΚΆΦΦΡήΒΡ‘≤ΜΖΘ§»γΆΦ29Υυ ΨΓΘ‘≤ΜΖ ÷Μ”–8ΗωΘ§»γΙϊ“ΣΆξ≥…άϊ”ΟΥ―Υς“ΐ«φ»ΈΈώΘ§”–ΝΫΗω‘≤ΜΖ «≤ΜΩ…ΡήΑΈœ¬ ά¥ΒΡΘ§Υυ“‘Θ§Αθ≥”ΡΘ–Ά…œΉνΕύΩ…Ρή≥÷”–6Ηω‘≤ΜΖΘΜ»γΙϊ≤ΜœκΜρ≤ΜΡήΆξ ≥…άϊ”ΟΥ―Υς“ΐ«φ»ΈΈώΘ§Α―“ΐ«φ…œΒΡ»ΐΗω‘≤ΜΖΕΦΖ≈ΒΫΑθ≥”…œΘ§“‘≤Ι≥Ξ ΒΟΖ÷ΒΡΥπ ßΓΘ
–η“ΣΉΔ“βΒΡ «Θ§»ΈΈώ“Σ«σΑθ≥”ΡΘ–Ά“≥÷”–”‘≤ΜΖΘ§“ρ¥ΥΘ§‘≤ΜΖ ±Ί–κ÷±Ϋ”Ι“‘ΎΑθ≥”ΡΘ–ΆΒΡΚΎ…Ϊ…λ≥ωΗΥ…œΘ§ΦδΫ”Ι“‘Ύ…λ≥ωΗΥ…œΜρΙ“‘Ύ ΡΘ–Ά±πΒΡΈΜ÷ΟΨυ≤ΜΖϊΚœ“Σ«σΓΘ

Δ“ ‘ΦΦϊΘ®œόΕ®ΖΫΖ®Θ© ΜζΤς»Υ”Πœ» ΙΡΘ–Ά…œΒΡΜΤ…Ϊ≤ΩΦΰœρΡœ‘ΥΕ·Θ§ ΙΡΘ–Ά÷–ΒΡ“«ρ”≥ί¬÷ΡωΚœΘ§≤Δ÷ΜΡή”Ο≤ΠΕ·ΡΘ–Ά…œ≤Π¬÷ΒΡΖΫΖ® Ι±μ≈Χ…œΒΡ÷Η’κΥ≥ ±’κΉΣΕ·ΓΘ ≤Π¬÷ΒΡ≥θ ΦΈΜ÷Ο «Κλ…Ϊ“ΕΤ§¥Ι÷±œρ…œΓΘ ‘ΎΜζΤς»ΥΝΫ¥ΈΤτΕ·/÷ΊΤτ÷°ΦδΘ§≤Π¬÷÷ΜΡή±ΜΉΣΕ·ΝΫΗω90°ΓΘ ΜΤ…Ϊ≤ΩΦΰœρΡœ”÷»ΖΕ®ΒΡΖ÷÷ΒΘ§÷Η’κΥ≥ ±’κΉΣΕ·÷Μ «ΒΟΒΫ“ΜΗωΑΌΖ÷ ΐΓΘΥυ”–Ζ«‘ΦΦϊ»ΈΈώΒΡΉήΖ÷”κ¥ΥΑΌΖ÷ ΐΒΡ≥ΥΜΐΨΆ «‘ωΦ”ΒΡΖ÷ ΐΓΘΡήΒΟΒΫΒΡΑΌΖ÷ ΐ»ΓΨω”Ύ÷Η’κΥυ÷ΗΒΡΈΜ÷ΟΘ§ ΦϊΆΦ30ΓΘ÷Η’κΒΡ‘≠ ΦΈΜ÷Ο¬‘ΒΆ”ΎΒΎ“ΜΗωΚλ…ΪΒΟΖ÷Βψ10%Θ§ΒΎ“Μ¥ΈΉΣΕ·≤Π¬÷90°Ω… Ι÷Η’κ÷Η œρ10%ΓΘ¥ΥΚσΘ§≤Π¬÷ΟΩΉΣΕ·90°Θ§ΒΟΒΫΒΡΑΌΖ÷ ΐ‘ωΦ”1%ΓΘ

άΐ»γΘ§Ρ≥Ε”Άξ≥…ΒΡΖ«‘ΦΦϊ»ΈΈώ ΙΗΟΕ”ΜώΒΟ410Ζ÷Θ§ ήΒΫΙΐ3¥Έ¥ΠΖΘΘ§Άξ≥…‘ΦΦϊ»ΈΈώ ±Θ§ ≥…ΙΠΒΊ ΙΜΤ…Ϊ≤ΩΦΰœρΡœΘ§≤Π¬÷ΉΣΕ·ΝΥ6Ηω90°Θ§ΉνΚσΒΡΒΟΖ÷ «ΘΚ
410++3*Θ®-10Θ©+[410+3*Θ®-10Θ©]*[Θ®6-1Θ©*1%+10%]+20=457
14÷÷»ΈΈώΒΡΒΟΖ÷ΧθΦΰΙιΡ…”Ύ±μ1÷–ΓΘ
±μ 1 »ΈΈώΒΟΖ÷ΧθΦΰ

5.3 ΜζΤς»Υ¥”ΜυΒΊ≥ωΖΔΘ§≥ω»ΞΉΏ“Μ»ΠΜρΕύ»ΠΘ§ΟΩ¥ΈΆξ≥…“ΜΗωΜρΕύΗω»ΈΈώΓΘ
5.4 Άξ≥…»ΈΈώ≤Μ±ΊΑ¥’’Ρ≥÷÷ΧΊΕ®ΒΡΥ≥–ρΘ§Ω…“‘Ζ¥Η¥≥Δ ‘Άξ≥…Ρ≥Ηω»ΈΈώΘ®»ΈΈώΉνΕύ÷ΜΡή ‘ ΝΫ¥ΈΘ©Θ§ΒΪ≥Γ…œΈοΧε≤ΜΜαΑ¥’’≤Έ»ϋΕ”‘±ΒΡ“Σ«σΙιΈΜΓΘ
5.5 ≥ΐΧΊ±πΥΒΟςΒΡ»ΈΈώΆβΘ§Άξ≥…»ΈΈώΒΡΫαΙϊ±Ί–κ“Μ÷±±ΘΝτΒΫ±»»ϋΫα χΘ§Φ¥Θ§Υυ“Σ«σΒΡΫα Ιϊ‘Ύ≥Γ…œ»‘ΡήΩ¥ΒΫΘ§’β «ΒΟΖ÷ΒΡ±Ί“ΣΧθΦΰΓΘΜζΤς»Υ“ΣΆξ≥…ΒΡ»ΈΈώΥδ»Μ «ΕάΝΔΒΡΘ§ΒΪ «Θ§ »γΙϊ‘ΎΆξ≥…»ΈΈώ B ±ΤΤΜΒΝΥ“―Ψ≠Άξ≥…ΙΐΒΡ»ΈΈώ A ΒΡΒΟΖ÷ΧθΦΰΘ§»ΈΈώ A ΫΪ≤ΜΡήΒΟΖ÷ΓΘ
5.6 ≥ΐ‘ΦΦϊ»ΈΈώΆβΘ§Ω…ΡήΒΡΉνΗΏΖ÷ΈΣ 530 Ζ÷Θ§Άξ≥…‘ΦΦϊ»ΈΈώΒΡΉνΗΏ‘ωΖ÷±»άΐΈΣ 58%Θ§Ζ« ‘ΦΦϊ»ΈΈώΒΡΒΟΖ÷‘ωΈΣ 837.4Θ§‘ΌΦ”ΡωΚœΒΡΒΟΖ÷ 20Θ§Υυ“‘Θ§άμ¬έ…œΒΡΉνΗΏΒΟΖ÷ΈΣ 857.4 Ζ÷ΓΘ 5.7 ≤Έ»ϋΕ”Ϋχ»κ»ϋ≥ΓΚσΘ§”…≥ι«©»ΖΕ®ΒΡ ΐΟϊΕ”‘±¥ζ±μΫΪ≥ι«©»ΖΕ®≥ΖœϊΦΗœνΙφΕ®ΒΡ»ΈΈώΓΘ
±»»ϋ÷–Θ§ΜζΤς»Υ≤ΜΡή‘Ό»ΞΆξ≥…“―≥ΖœϊΒΡ»ΈΈώΓΘ±Μ≥ΖœϊΒΡ»ΈΈώ“ΜΒ©–ϊ≤ΦΘ§≤Μ‘Ό±δΜ·ΓΘΈ¥≥Ζ œϊΒΡ»ΈΈώΒΡ τ–‘÷ΒΈΣ 1Θ§“―≥ΖœϊΒΡ»ΈΈώΒΡ τ–‘÷ΒΈΣ-2ΓΘ
6 ±»»ϋ
6.1 »ϋ÷Τ
FLL ΜζΤς»ΥΙΛ≥ΧΧτ’Ϋ»ϋΑ¥–Γ―ßΓΔ≥θ÷–ΓΔΗΏ÷–»ΐΗωΉι±πΖ÷±πΫχ––±»»ϋΓΘ±»»ϋ≤ΜΖ÷≥θ»ϋ ΚΆΗ¥»ϋΘ§≤…”Ο¥σ―≠ΜΖ÷ΤΓΘΉιΈ·ΜαΫΪ±Θ÷ΛΟΩ÷ß≤Έ»ϋΕ”÷Ν…Ό”– 3 ¥Έ”κ≤ΜΆ§Ε‘ ÷±»»ϋΒΡΜζΜαΓΘ ≤Έ»ϋΕ”“‘≥ι«©ΖΫ Ϋ»ΖΕ®±ύΚ≈ΓΘ“‘≤Έ»ϋΕ”±ύΚ≈≈≈ΒΡΕ‘’σΆΦΫΪ‘Ύ≥ι«©ΚσΙΪ≤ΦΓΘ‘ΎΡ≥–©«ιΩωœ¬Θ§ Ρ≥÷ß≤Έ»ϋΕ”Ω…ΡήΟΜ”–Ε‘ ÷Θ§ΥϋΒΞΕά‘Ύ»ϋΧ®…œΆξ≥…»ΈΈώΒΡΒΟΖ÷»‘»Μ”––ßΓΘ
6.2 ≤Έ»ϋΕ”
6.2.1 ΟΩ÷ß≤Έ»ϋΕ”Ω…“‘”… 4 Οϊ―ß…ζΚΆ 1 ΟϊΫΧΝΖ‘±Θ®ΫΧ ΠΜρ―ß…ζΘ©Ήι≥…ΓΘ―ß…ζ±Ί–κ « 2015Ρξ 6 ‘¬«Α»‘»Μ‘Ύ–ΘΒΡ―ß…ζΓΘ
6.2.2 ΟΩ≥Γ±»»ϋ÷–Θ§≥ΐΫτΦ±–όάμΆβΘ§÷ΜΡή”– 2 ΟϊΕ”‘±Οφœρ»ϋΧ®ΓΘΤδΥϊΕ”‘±Ω…’Ψ‘ΎΗΫΫϋΘ§ ΨΏΧεΈΜ÷Ο”…≤Ο≈–≥Λ»ΖΕ®Θ§“‘±ψ–η“Σ ±Ϋι»κΘ§ΒΪΥϊΟ«≤ΜΒΟΡΟΉ≈±»»ϋΤς≤ΡΓΘ
6.3 ±»»ϋΙΐ≥Χ
6.3.1 »ϋ«ΑΦλ≤ι
≤Έ»ϋΕ”ΒΡΜζΤς»Υ‘Ύ±»»ϋ«Α–η“ΣΫ” ή≤Ο≈–‘±ΒΡΦλ≤ιΘ§Φλ≤ιΡΎ»ίΑϋά®Τς≤Ρά¥‘¥ΓΔΜζΤς»Υ Α≤»Ϊ–‘Β»ΓΘ
6.3.2 »ϋ«ΑΉΦ±Η
6.3.2.1 ≤Έ»ϋΕ”Α¥±»»ϋ ±Φδ±μΧα«ΑΑκ–Γ ±Φλ¬ΦΫχ»κΉΦ±Η«χΘ§‘ΎΉΦ±Η«χΒς ‘ΜζΤς»ΥΘ®60 Ζ÷ ÷”Θ©ΓΘ≤Έ»ϋΕ””ΠΉ‘¥χ±ψ–· ΫΦΤΥψΜζ≤ΔΩ…–·¥χΈ§–ό”ΟΒΡ±ΗΦΰΓΘ≤Έ»ϋΕ”‘±‘ΎΫχ»κΉΦ±Η«χ«Α”Π ΫΪΉ‘ΦΚΒΡ ÷ΜζΓΔΈόœΏ¬Ζ”…ΤςΓΔΈόœΏΆχΩ®Β»Ά®–≈…η±ΗΦΑ U ≈ΧΓΔΙβ≈ΧΒ»¥φ¥ΔΫι÷ ΫΜ±ΨΕ”ΒΡΫΧ ΝΖ‘±ΜρΦ“≥Λ±ΘΙήΓΘ≤Έ»ϋΕ”‘±‘Ύ»ϋ≥ΓΡΎ≤ΜΒΟ“‘»ΈΚΈΖΫ Ϋ”κ±ΨΕ”ΒΡΫΧΝΖ‘±ΜρΦ“≥ΛΝΣœΒΓΘ 6.3.2.2 Ρ≥“ΜΉι±πΒΡ»Ϊ≤Ω≤Έ»ϋΕ”‘ΎΉΦ±Η«χΨΆΈΜΚσΘ§≤Ο≈–≥ΛΗυΨί≥ι«©ΫαΙϊ–ϊ≤Φ±Ψ¥Έ±»»ϋ“Σ≥Ζ œϊΒΡ»ΈΈώΓΘ≥Ζœϊ»ΈΈώΒΡ»ΈΈώΡΘ–Ά»‘±ΘΝτ‘Ύ»ϋΧ®…œΘ§ΒΪΜζΤς»Υ≤ΜΡή»ΞΆξ≥…“―≥ΖœϊΒΡ»ΈΈώΓΘ ≤Έ»ϋΕ””ΠΗυΨί≥ΖœϊΒΡ»ΈΈώ–όΗΡΉ‘ΦΚΒΡΜζΤς»ΥΒΡΫαΙΙΚΆ≥Χ–ρΓΘΉΦ±Η ±ΦδΈΣ 2 –Γ ±ΓΘ
6.3.2.2 ≤Έ»ϋΕ”ΉΦ ±ΒΫ±»»ϋ«χΚσΘ§÷Ν…Ό”–“ΜΖ÷÷” ±Φδ»ΞΉΦ±ΗΚΆΑ≤≈≈Έ¥Φ”ΒγΒΡΜζΤς»Υ“‘ΦΑΫΪ “Σ“ΤΕ·ΚΆ Ι”ΟΒΡΈοΤΖΓΘ
6.3.2.3 ≤Έ»ϋΕ”±Ί–κ Ι”Ο±»»ϋΧαΙ©ΒΡ»ΈΈώΡΘ–ΆΘ§≤ΜΡή–·¥χΉ‘ΦΚΒΡΡΘ–ΆΒΫ±»»ϋ«χΓΘ≤Έ»ϋΕ”‘± ”κ≤Ο≈–‘±“ΜΤπΚΥ≤ι»ϋΧ®…œΒΡΡΘ–ΆΒΡ ΐΝΩΚΆΈΜ÷ΟΓΘ
6.3.2.4 »ϋ«ΑΉΦ±Η÷–Θ§≤Έ»ϋΕ”≤ΜΡήΈΣ¬ζΉψΉ‘ΦΚΒΡ–η“ΣΕχ≤πœ¬»ΈΈώΡΘ–ΆΘ§Α―»ΈΈώΡΘ–ΆΙΧΕ®ΒΫ ΜζΤς»Υ…œΘ§Α―»ΈΈώΡΘ–ΆœύΜΞΝ§Ϋ”Θ§ΫΪ»ΈΚΈΕΪΈςΙΧΕ®ΒΫ»ΈΈώΡΘ–Ά…œΘ§ΈΣ≤Ώ¬‘ΒΡ–η“ΣΫ”¥ΞΜυ ΒΊΆβΒΡ»ΈΈώΡΘ–ΆΘ§“‘ΦΑ‘ΎΨΚ»ϋ«χΗΫΫϋœ¬‘Ί≥Χ–ρΓΘ
6.3.2.5 ‘ΎΉΦ±Η ±ΦδΡΎΘ§≤Έ»ϋΕ”‘±Ω…“‘‘ΎΜυΒΊΆβ–ΘΉΦΙβΒγ¥ΪΗ–ΤςΓΘ
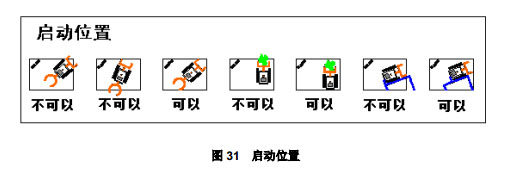
6.3.2.6 ‘ΎΉΦ±ΗΤτΕ· ±Θ§ΜζΤς»Υ±Ί–κ‘ΎΤτΕ·ΈΜ÷Ο≤ΜΕ·Θ§≤Έ»ϋΕ”‘±≤ΜΡήΫ”¥ΞΜζΤς»ΥΚΆΫΪ“Σ“Τ Ε·Μρ Ι”ΟΒΡ»ΈΚΈΈοΤΖΓΘΜζΤς»ΥΒΡ»ΈΚΈ≤ΩΖ÷“‘ΦΑΫΪ“Σ“ΤΕ·Μρ Ι”ΟΒΡ»ΈΚΈΈοΤΖ±Ί–κΆξ»ΪΡ…»κ ΜυΒΊΘ§≤Μ‘ –μ»ΈΚΈΕΪΈς≥§≥ω–ιΡβΒΡΜυΒΊΩ’ΦδΘ§»γΆΦ 31 Υυ ΨΓΘΜζΤς»ΥΩ…“‘Θ®ΒΪ≤Μ“Σ«σΘ©”κΫΪ“Σ“ΤΕ·Μρ Ι”ΟΒΡΈοΤΖΫ”¥ΞΓΘ
6.3.2.7 ΉΦ±Η“ΜΧ®…–Έ¥Φ”ΒγΒΡΜζΤς»Υ ±Θ§≤Έ»ϋΕ”Ω…“‘”ΟΉ‘ΦΚΉΦ±ΗΒΡ≤Ώ¬‘ΈοΤΖΘ®ΈΣΝΥ≤Ώ¬‘ΒΡ –η“ΣΕχΉΦ±ΗΒΡΈοΤΖΘ§≤Μ «ΜζΤς»ΥΘ© ΙΥϋΕ‘ΉΦΡ≥ΗωΡΩ±ξΘ§ΒΪ «‘ΎΜζΤς»ΥΤτΕ·«ΑΘ§±Ί–κΥ…ΩΣ ≤Ώ¬‘ΈοΤΖΓΘ
6.3.2.8 Άξ≥…ΉΦ±ΗΙΛΉςΚσΘ§Ε”‘±”Πœρ≤Ο≈–‘± Ψ“βΓΘ
6.3.3 ΤτΕ·
6.3.3.1 ≤Ο≈–‘±»Ζ»œΝΫΗω≤Έ»ϋΕ”Ψυ“―ΉΦ±ΗΚΟΚσΘ§ΫΪΖΔ≥ω“5Θ§4Θ§3Θ§2Θ§1Θ§ΩΣ Φ”ΒΡΒΙΦΤ ΐΤτΕ·ΩΎΝνΓΘΥφΉ≈ΒΙΦΤ ±ΒΡΩΣ ΦΘ§≤ΌΉς ÷Ω…“‘”Ο“Μ÷Μ ÷¬ΐ¬ΐΩΩΫϋΜζΤς»ΥΘ§ΧΐΒΫ“ΩΣ Φ” ΟϋΝνΒΡΒΎ“ΜΗωΉ÷Θ§≤ΌΉς ÷Ω…“‘¥Ξ≈ω“ΜΗωΑ¥≈ΞΜρΗχ¥ΪΗ–Τς“ΜΗω–≈Κ≈»ΞΤτΕ·ΜζΤς»ΥΓΘ
6.3.3.2 ΗΚ‘πΤτΕ·ΜζΤς»ΥΒΡ≤Έ»ϋΕ”‘±Ε‘ΜζΤς»ΥΥυΉωΒΡΈ®“ΜΕ·Ής «»Ο≥Χ–ρ‘Υ––ΓΘ‘ΎΒΙΦΤ ±ΤΎ ΦδΘ§≤Έ»ϋΕ”‘±≤ΜΡή¥ΞΟΰΜζΤς»ΥΜρΫΪ“Σ Ι”ΟΜρ“ΤΕ·ΒΡΈοΤΖΓΘ»γΙϊ¥ΞΟΰΝΥΘ§≤Ο≈–Μα÷Ί–¬ΩΣ Φ ΒΙΦΤ ±ΓΘ
6.3.3.3 ‘Ύ“ΩΣ Φ”ΟϋΝν«ΑΤτΕ·ΜζΤς»ΥΫΪ±Μ ”ΈΣ“ΈσΤτΕ·”≤Δ ήΒΫΨ·ΗφΜρ¥ΠΖΘΓΘ
6.3.3.4 “ΜΒ©±»»ϋΩΣ ΦΘ§≤ΜΒΟ“‘»ΈΚΈάμ”…÷–ΕœΜρ‘ίΆΘ±»»ϋΓΘ
6.3.4 Ε‘±»»ϋΕ·ΉςΒΡΙφΕ®
6.3.4.1 “ΜΑψά¥ΥΒΘ§Άξ≥…»ΈΈώ≤Δ≤Μ–η“Σ Ι”ΟΧΊΕ®ΒΡΖΫΖ®Θ§“≤ΙΡάχ≤Έ»ϋΕ”Ή‘”…¥¥‘λΓΘΒΪ «Θ§ »γΙϊΙφ‘ρ“Σ«σ”ΟΡ≥÷÷ΧΊΕ®ΖΫΖ®Άξ≥…Ρ≥Ηω»ΈΈώΘ§ΨΆ±Ί–κ”ΟΡ«ΗωΖΫΖ®Θ§Ζώ‘ρ≤Ο≈–≤Μ»œΈΣ «Άξ ≥…»ΈΈώΓΘ
6.3.4.2 »γΙϊΜζΤς»Υ“Σ¥”ΜυΒΊ“Τ≥ω“ΜΗω»ΈΈώΡΘ–ΆΘ§ΗΟΡΘ–Ά±Ί–κΡήΡΟΤπΕχΟΜ”–¥χΤπΤδΥϋ»ΈΚΈ ΈοΤΖΓΘΖώ‘ρΘ§≤Ο≈–‘±ΫΪ≤Μ‘ –μΜζΤς»ΥΤτΕ·ΓΘ
6.3.4.3 ΜζΤς»Υ“ΜΨ≠ΤτΕ·Θ§ΨΆ±Μ»œΈΣ «“Ή‘÷ςΒΡ”Θ§’β÷÷Ή¥Χ§“Μ÷±±Θ≥÷ΒΫ≤Έ»ϋΕ”‘±œ¬“Μ¥Έ ¥Ξ≈ωΜζΤς»ΥΜρ»ΈΚΈΡΘ–ΆΜρ’ΐ‘Ύ“ΤΕ·Μρ Ι”ΟΒΡΈοΤΖΓΘΖΔ…ζ…œ ωΫ”¥ΞΕ·Ής ±Θ§ΜζΤς»ΥΨΆΝΔΩΧ ±Μ»œΈΣ «“≤ΜΜνΕ·ΒΡ”Θ§»γΙϊΥϋ≤Μ‘ΎΜυΒΊΘ§ΨΆ±Ί–κΡΟΜΊΜυΒΊΒς’ϊΓΔ÷Ί–¬≈δ÷Ο≤ΔΉΦ±Η÷Ί–¬ ΤτΕ·ΓΘ
6.3.4.4 »γΙϊΫ”¥ΞΉ‘÷ςΒΡΜζΤς»Υ ±Υϋ’ΐ‘Ύ≤Ώ¬‘–‘ΒΊ“ΤΕ·Ρ≥ΗωΡΘ–ΆΜρ≤Ώ¬‘ΈοΤΖΘ§¥”ΜυΒΊ“Τ≥ω ΒΡΈοΤΖΥφΜζΤς»Υ“ΜΤπΡΟΜΊΜυΒΊΘ§ΦΧ–χ Ι”ΟΘΜ≤Ο≈–‘±ΫΪΑ―Ρ«–©‘ΎΜυΒΊΆβ”ωΒΫΒΡΈοΤΖΡΟ≥ω≥ΓΆβΘ§≤Μ‘Ό Ι”ΟΓΘ
6.3.4.5 ÷Μ”–‘Ύœ‘»Μ «“Σ»ΟΜζΤς»Υ≥ωΜυΒΊΒΡ ±ΚρΘ§≤Έ»ϋΕ”‘±≤≈Ω…“‘ΫΪ“Σ“ΤΕ·ΒΡΈοΤΖΆξ»ΪΖ≈ ΒΫΜυΒΊάοΘ§»ΟΉ‘÷ςΒΡΜζΤς»Υ”κΥϋœύΜΞΉς”ΟΓΘ»ΜΕχΘ§Α―ΈοΤΖΖ≈ΒΫΉ‘÷ςΒΡΜζΤς»Υ…œΘ§±Μ»œΈΣ «ΦδΫ”Ϋ”¥ΞΘ§±Ί–κ÷Ί–¬ΤτΕ·ΓΘ
6.3.4.6 ≤ΜΙή“ρΈΣ ≤Ο¥‘≠“ρΕχ÷Ί–¬ΤτΕ·Θ§”ΠΑ¥’’ 6.3.2.4 ΒΡ“Σ«σ‘ΎΜυΒΊΡΎΑΎΖ≈ΜζΤς»Υ”κΈο ΤΖΓΘ
6.3.4.7 »γΙϊΈ¥±ΜΫ”¥ΞΒΡΉ‘÷ςΜζΤς»Υ”κΥυ“ΤΕ·Μρ Ι”ΟΒΡΈοΤΖΆ―άκΝΥΫ”¥ΞΘ§‘ρΗΟΈοΤΖ”ΠΝτ‘Ύ ‘≠ΒΊΘ§÷±ΒΫΜζΤς»Υ÷Ί–¬”κΥϋΫ”¥ΞΓΘ’βάύΈοΤΖ≤ΜΡή”Ο ÷»ΞΜ÷Η¥ΓΘ
6.3.4.8 ±ΜΉ‘÷ςΜζΤς»ΥΗΡ±δΝΥΒΡ≥ΓΒΊΉ¥Χ§Θ§≤ΜΡήΜ÷Η¥ΓΘ≤Έ»ϋΕ”‘±Ϋ”¥ΞΉ‘÷ςΒΡΜζΤς»Υ ±Θ§Μζ Τς»Υ±Ί–κΝΔΦ¥ΆΘ÷ΙΓΘ»γΙϊ‘ΎΜζΤς»ΥΆΘ÷ΙΤΎΦδΗΡ±δΝΥ≥ΓΒΊΉ¥Χ§Θ§≤Ο≈–ΜαΨΓΝΠΜ÷Η¥ΓΘ»γΙϊΈό Ζ®Μ÷Η¥≥ΓΒΊΘ§ΨΆ÷ΜΡή±Θ≥÷“‘≠―υ”ΓΘ
6.3.4.9 ±»»ϋΩ…ΡήΜα”–“Μ–©≈Φ»ΜΒΡ ¬Ι ΒΦ÷¬≥ΓΒΊΒΡΉ¥Χ§ΖΔ…ζ±δΜ·ΓΘ»γΙϊ≤Ο≈–‘±ΨθΒΟ≤ΜΡ―Μ÷ Η¥Θ§ΨΆΝΔΦ¥Μ÷Η¥‘≠Ή¥ΘΜΖώ‘ρ≤Μ”ηΜ÷Η¥ΓΘ»γΙϊ≥ΓΒΊΉ¥Χ§ΒΡ±δΜ· «≤Έ»ϋΕ”ΒΡΙΐ ß‘λ≥…ΒΡΘ§±δ Μ·ΒΦ÷¬ΒΡΒΟΖ÷Έό–ßΘ§±δΜ·ΒΦ÷¬ΒΡΩέΖ÷”––ßΘΜ»γΙϊ≥ΓΒΊΉ¥Χ§ΒΡ±δΜ·≤Μ «≤Έ»ϋΕ”ΒΡΙΐ ßΘ§≤Έ»ϋΕ”ΫΪ‘ΎΒΟΖ÷…œΜώΒΟ¥”ΩμΒΡ≤ΟΨωΓΘ
6.3.4.10 ΜυΒΊΡΎΩ…ΒΟΖ÷ΒΡ»ΈΈώΡΘ–ΆΜρΈοΤΖΘ§”Π“Μ÷±‘Ύ≤Ο≈–‘± ”œΏ÷°ΡΎΓΘ
6.3.4.11 ‘Ύ±»»ϋΙΐ≥Χ÷–Θ§Ε‘”Ύœ‘»Μ≤Μ «Ι “βΥπΜΒΕχΒΦ÷¬Ά―¬δΒΡΜζΤς»ΥΝψΦΰΘ§≤Έ»ϋΕ”Ω…«κ «σ≤Ο≈–Αο÷ζœ»“Τ≥ω≥ΓΆβΘ§‘ΎΜζΤς»ΥΜΊΒΫΜυΒΊΚσΘ§Ω…ΫΪΆ―¬δΒΡΝψΦΰΜ÷Η¥ΓΘ
6.3.4.12 ≤Έ»ϋΕ”ΒΡΜζΤς»Υ≤ΜΡή“‘»ΈΚΈΖΫ ΫΗ…»≈Ε‘ΖΫ ΒΡΜζΤς»ΥΓΔ≥ΓΒΊΜρ≤Ώ¬‘ΓΘ
6.3.4.13 ÷Μ“ΣΜζΤς»ΥΘ®Μρ”κΥϋΫ”¥ΞΒΡΈοΧεΘ©ΒΡΡ≥“Μ ≤ΩΖ÷Ϋχ»κΜυΒΊΨΆΩ…“‘”Ο ÷ΫΪΥϋΟ«ΡΟΒΫΜυΒΊάοΓΘΒΪ «Θ§ Ε‘’βΗωΜζΤς»Υ…œΥυ–·¥χΒΡ¥”ΜυΒΊΆβΡΟΜΊΒΡ»ΈΈώΡΘ –ΆΘ§“ΣΑ¥ 6.3.4.4 ¥ΠάμΓΘ»γΙϊΜζΤς»ΥΫχ»κΜυΒΊάοΒΡΫω «“ΜΧθ…ΰΥςΓΔ»μΙήΓΔΒΦœΏΓΔΙήΉ”ΓΔΝ¥ΧθΜρΤδΥϋœ‘»Μ «ΈΣΝΥ…λ’ΙΜζΤς»ΥΕχ…ηΦΤΒΡ≈δΦΰΘ®Ζ«ΜζΤς»Υ÷ςΧεΘ©Θ§ ΨΆ≤Μ»œΈΣΜζΤς»ΥΒΡΡ≥“Μ≤ΩΖ÷Ϋχ»κΝΥΜυΒΊΓΘΕ‘ΜζΤς»Υ ΚΆ–·¥χΈοΤΖΫχ»κΜυΒΊΒΡ≈–Εœ±ξΉΦ»γΆΦ 32 Υυ ΨΓΘ
6.3.4.14 »γΙϊΜζΤς»ΥΆΘ‘ΎΦ¥ΫΪΜώΒΟ“ΜΗω»ΈΈώΒΟΖ÷ΒΡ Ή¥Χ§Θ§Φ¥ Ι≤Ώ¬‘–‘ΒΊΡΟΜΊΜζΤς»ΥΘ§’βΗω»ΈΈώ“≤≤ΜΡή ΒΟΖ÷ΓΘ
6.3.5 ±»»ϋΫα χ
6.3.5.1 ΟΩ≥Γ±»»ϋ ±ΦδΈΣ 150 Οκ÷”Θ§≤Ο≈–‘±“‘…Ύ“τΫα χ±»»ϋΓΘ¥ΥΚσΘ§≤Έ»ϋΕ”‘±”ΠΝΔΦ¥ΆΘ÷Ι Ή‘÷ςΒΡΜζΤς»ΥΓΘ“ρΆΘ÷Ι≤ΜΦΑ ±‘λ≥…ΒΡΒΟΖ÷Έό–ßΓΘ‘Ύ≤Ο≈–‘±»Ζ»œΒΟΖ÷«ΑΘ§»ΈΚΈ»Υ≤ΜΡή¥Ξ≈ω ΚΆ“ΤΕ·≥Γ…œΒΡΒΟΖ÷ΈοΤΖΚΆΗΡ±δΒΟΖ÷Ή¥Χ§ΓΘ
6.3.5.2 ≤Έ»ϋΕ”‘ΎΆξ≥…Υυ”–ΙφΕ®»ΈΈώΚσ”ΠΝΔΦ¥œρ≤Ο≈–‘±ΨΌ ÷ Ψ“βΘ§≤Ο≈–‘±ΫΪΦ«¬ΦΆξ≥…»ΈΈώΒΡ ±ΦδΓΘΆ§“ΜΉι»ϋΧ®…œΒΡΝμ“Μ÷ß≤Έ»ϋΕ”Ω…“‘ΦΧ–χ÷¥––»ΈΈώΘ§÷±ΒΫ 150 Οκ÷”ΓΘ
6.3.5.3 ≤Ο≈–‘±Φ«¬Φ≥Γ…œΉ¥Χ§Θ§Χν–¥Φ«Ζ÷±μΓΘ≤Έ»ϋΕ”‘±”Π»Ζ»œΉ‘ΦΚΒΡΒΟΖ÷Θ§–≠÷ζ≤Ο≈–‘±Μ÷ Η¥≥ΓΒΊΘ§ΝΔΦ¥ΫΪΉ‘ΦΚΒΡΜζΤς»ΥΑαΜΊΉΦ±Η«χ≤ΔΉΔ“β≤Μ“Σ¥χΉΏ»ΈΈώΡΘ–ΆΚΆ±»»ϋ”ΟΈοΤΖΓΘ 6.3.5.4 ≤Έ»ϋΕ”‘±ΫΪ»ΈΈώΡΘ–ΆΚΆΈοΤΖΜ÷Η¥ΒΫΤτΕ·«ΑΉ¥Χ§ΓΘ
6.4 »ΖΕ®Μώ ΛΕ”
6.4.1 ΟΩ≥Γ±»»ϋΚσΘ§≤Έ»ϋΕ”ΒΡΉν÷’ΒΟΖ÷ΈΣΗς÷÷Ε·ΉςΒΡΒΟΖ÷Ωέ≥ΐΖΘΖ÷Θ§Α¥Ήν÷’ΒΟΖ÷Εύ…Ό»Ζ Ε® ΛΗΚΓΘ
6.4.2 Χτ’Ϋ»ϋΫα χΚσΘ§Α¥ΟΩ÷ß≤Έ»ϋΕ”‘ΎΗς≥Γ¥ΈΒΡΒΟΖ÷ΉήΚΆ≈≈ΟϊΓΘ»γΙϊ≥ωœ÷Ψ÷≤Ω≤ΔΝ–ΒΡ«ι ΩωΘ§“‘≤Έ»ϋΕ”ΒΡ“Μ¥ΈΉνΒΆ±»»ϋΒΟΖ÷»ΖΕ®œ»ΚσΘΜ»γΙϊ»‘»Μ≤ΔΝ–Θ§“‘≤Έ»ϋΕ”ΒΡ¥ΈΒΆ±»»ϋΒΟΖ÷ »ΖΕ®œ»ΚσΘΜ»γΙϊ»‘»Μ≤ΔΝ–Θ§”…≤Ο≈–≥ΛΗυΨί≤Έ»ϋΕ”ΒΡ≥Γ…œ±μœ÷»ΖΕ®œ»ΚσΓΘ
7 Φ«Ζ÷
7.1 ΈΣΦθ…Ό±»»ϋΤΎΦδΒΡ’υ“ιΘ§ΗΟ≥Γ±»»ϋΫα χΚσ÷ΜΗυΨίΒ± ±≥ΓΒΊ…œΒΡ«ιΩωά¥≈–Ε®ΒΟΖ÷ΓΘ±» »ϋΫα χ ±Θ§≤Ο≈–ΜαΉ–œΗΦλ≤ι»ϋ≥Γ≤ΔΦ«œ¬ΈοΤΖΒΡΉ¥Χ§ΚΆΈΜ÷ΟΓΘ’βΨΆ «ΥΒΘ§»γΙϊ“―Ψ≠Άξ≥…ΒΡ »ΈΈώ±ΜΜζΤς»Υ‘Ύ±»»ϋΫα χ«ΑΤΤΜΒΝΥΘ§ΨΆΈόΖ®ΒΟΒΫΗΟΖ÷ ΐΓΘ
7.2 Ε‘”ΎΟΩœν“―Άξ≥…ΒΡ»ΈΈώΥυΦ«ΒΡΖ÷ ΐΘ§≤ΈΦϊ“5 »ΈΈώΥΒΟς”“ΜΫΎΓΘ”…”ΎΡ≥–©»ΈΈώ «œό Ε®ΖΫΖ®ΒΡΘ§ΟΜ”–≤…”ΟΙφΕ®ΒΡΖΫΖ®Φ¥ Ι¥Π”ΎΒΟΖ÷Ή¥Χ§≤Μ”ηΦ«Ζ÷ΓΘ
7.3 Έ¥≥ΖœϊΒΡ»ΈΈώΒΡ τ–‘÷ΒΈΣ 1Θ§“―≥ΖœϊΒΡ»ΈΈώΒΡ τ–‘÷ΒΈΣ-2ΓΘΒΟΖ÷ΈΣ“5 »ΈΈώΥΒΟς” “ΜΫΎΒΡΆξ≥…»ΈΈώΒΡΒΟΖ÷≥ΥΗΟ»ΈΈώΒΡ τ–‘÷ΒΓΘΨΆ «ΥΒΘ§»γΙϊΆξ≥…ΝΥ“―≥ΖœϊΒΡ»ΈΈώΘ§ΒΟΖ÷Φ”±Ε«“ΈΣΗΚΓΘ
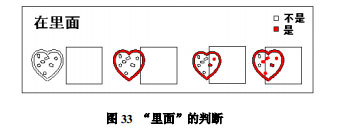
7.4 ≈–Ε®ΒΟΖ÷ ±Θ§≥Θ≥Θ“Σ≈–Ε®Ρ≥ΈοΤΖ «Ζώ‘ΎΡ≥«χ”ρ“άοΟφ”Θ§≈–Εœ±ξΉΦ «»γΙϊ A ΒΡ»ΈΚΈ “Μ≤ΩΖ÷Η≤Η« B «χ”ρΘ§A ΨΆ‘Ύ B ΒΡ“άοΟφ”Θ§»γΆΦ 33 Υυ ΨΓΘ÷±Ϋ”Ϋ”¥Ξ“≤ΟΜ”–ΙΊœΒΓΘ»ίΤς ÷–ΒΡΈοΤΖ“ΣΒΞΕά≤ΟΕ®Θ§”κ»ίΤςΈόΙΊΓΘ
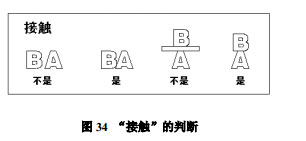
7.5 ”– ±Θ§ΜΙ–η“Σ≈–Ε®Ρ≥ΈοΤΖ”κΜζΤς»ΥΓΔ»ΈΈώΡΘ–ΆΜρΝμ“ΜΈοΤΖ «ΖώΫ”¥ΞΓΘ»γΙϊ A ”κ B ÷± Ϋ”Ϋ”¥ΞΘ§ΨΆ « A Ϋ”¥ΞΝΥ BΘ§»γΆΦ 34 Υυ ΨΓΘ
7.6 Ε‘Άξ≥…Υυ”–Έ¥≥Ζœϊ»ΈΈώ«“ΟΜ”–Άξ≥…»ΈΚΈ“ΜΗω“―≥Ζœϊ»ΈΈώΒΡ≤Έ»ϋΕ”Φ”Φ« ±ΦδΖ÷ΓΘ ±Φδ Ζ÷Β»”Ύ 150-Άξ≥…»ΈΈώ ±ΦδΘ®ΟκΘ©ΓΘ»γΙϊ≤Έ»ϋΕ” Ψ“β“―Άξ≥…»ΈΈώΘ§ΒΪ»ϋΚσΚΥ≤ι ±ΖΔœ÷≤Έ»ϋ Ε”≤ΔΈ¥Άξ≥…Υυ”–Έ¥≥Ζœϊ»ΈΈώΘ§ΜρΆξ≥…ΝΥ»ΈΚΈ“ΜΗω“―≥Ζœϊ»ΈΈώΘ§≤ΜΦ« ±ΦδΖ÷ΓΘ
7.7 ±»»ϋΫα χ ±Θ§“≈Ντ‘ΎΜυΒΊΆβΒΡΟΩΦΰ≤Ώ¬‘ΈοΤΖ±Μ»œΈΣ «ΕΣΤζΈοΘ§“Σ ήΒΫΕΣΤζΈο¥ΠΖΘΓΘ
7.8 »γΙϊΜζΤς»ΥΟςœ‘ΒΊΝΫ±Ε”ΎΜυΒΊΒΡΩμΕ»Θ§Έό¬έ «±»»ϋΙΐ≥Χ÷–ΜΙ «±»»ϋΫα χ ±Θ§Φ¥ ΙΥϋ ‘ΎΜυΒΊάοΘ§ΟΩ¥ΈΙΐΕ»…λ’ΙΨυ“Σ ήΒΫ…λ’Ι¥ΠΖΘΓΘ
8 ΖΗΙφΚΆ»Γœϊ±»»ϋΉ Ηώ
8.1 Έ¥ΉΦ ±ΒΫ¥οΒΡ≤Έ»ϋΕ”Θ§ΟΩ≥ΌΒΫ 1 Ζ÷÷”‘ρ≈–ΖΘΗΟΕ” 10 Ζ÷ΓΘ»γΙϊ±»»ϋΩΣ Φ 2 Ζ÷÷”Κσ≤Έ»ϋ Ε”»‘Έ¥ΒΫ≥ΓΘ§ΗΟΕ”ΫΪ±Μ»Γœϊ±»»ϋΉ ΗώΓΘ
8.2 ΒΎ“Μ¥ΈΈσΤτΕ·ΒΡ≤Έ»ϋΕ”ΫΪ ήΒΫ≤Ο≈–‘±ΒΡΨ·ΗφΘ§ΒΎΕΰ¥ΈΈσΤτΕ·ΒΡ≤Έ»ϋΕ”ΫΪ±Μ»Γœϊ±»»ϋ Ή ΗώΓΘ
8.3 ΈΞΖ¥Ε‘Τς≤ΡΚΆ»μΦΰΒΡΙφΕ®Θ§”÷ΈόΖ®Ψά’ΐΘ§”…≤Ο≈–≥ΛΨωΕ®¥ΠάμΑλΖ®Θ§ΒΪ «Θ§Έό¬έ‘θ―υ ¥ΠάμΘ§ΗΟ≤Έ»ϋΕ”≤ΜΡήΜώΫ±ΓΘ
8.4 ±ΨΫλ±»»ϋ÷–ΒΡ“Ϋ”¥Ξ¥ΠΖΘ”ΓΔ“…λ’Ι¥ΠΖΘ”ΓΔ“ΕΣΤζΈο¥ΠΖΘ””Ο¥ΠΖΘΡΘ–Ά Β ©ΓΘ»γΙϊΖΔ…ζ“Μ¥Έ’βάύ¥ΠΖΘΘ§≤Ο≈–‘±ΨΆ“ΣΑ―“ΜΗω¥ΠΖΘΡΘ–ΆΘ®“ΜΙ≤ 8 ΗωΘ©Ζ≈‘Ύ≤ΜΖΝΑ≠ΜζΤς»Υ‘ΥΕ·ΒΡΒΊ ΖΫΓΘ±»»ϋΫα χΚσΑ¥ΥυΖ≈ΡΘ–ΆΒΡΕύ…ΌΦ«ΖΘΖ÷ΓΘ
8.5 »γΙϊ»ΈΈώΡΘ–ΆΥπΜΒœ‘»Μ «≤Έ»ϋΕ”ΜρΜζΤς»Υ‘λ≥…ΒΡΘ§Έό¬έ «”–“βΜΙ «Έό“βΘ§ΫΪΨ·Ηφ“Μ ¥ΈΓΘΦ¥ Ι‘Ό¥ΈΆξ≥…»ΈΈώ“≤≤ΜΡήΒΟΖ÷ΓΘ
8.6 »γΙϊ≥ωœ÷≤ΜΚœΖ®ΒΡ»ΈΈώΡΘ–ΆΒΡΝ§Ϋ”Θ§≤Ο≈–‘±ΫΪ–ϊ≤ΦΜζΤς»Υ’β“Μ¥Έ¥”ΜυΒΊΤτΕ·Άξ≥…ΒΡ Υυ”–»ΈΈώΈό–ßΓΘ≥ΓΒΊΜ÷Η¥ΒΫΤτΕ·«ΑΒΡΉ¥Χ§Θ§ΜζΤς»ΥΦΑœύΙΊΡΘ–ΆΡΟΜΊΜυΒΊ÷Ί–¬ΤτΕ·Θ§ΒΪ≤Μ Ϋχ–– 8.4 ΒΡ¥ΠΖΘΓΘ
8.7 ±»»ϋ÷–Θ§≤Έ»ϋΕ”‘±”–“βΫ”¥Ξ±»»ϋ≥Γ…œΒΡΈοΤΖΜρΜζΤς»ΥΘ§ΫΪ±Μ»Γœϊ±»»ϋΉ ΗώΓΘ≈Φ»ΜΒΡ Ϋ”¥ΞΩ…“‘≤ΜΒ±ΉςΖΗΙφΘ§≥ΐΖ«’β÷÷Ϋ”¥Ξ÷±Ϋ””ΑœλΒΫ±»»ϋΒΡΉν÷’ΒΟΖ÷ΓΘ
8.8 »γΙϊ¥”ΜζΤς»Υ…œΖ÷άκ≥ωά¥ΒΡ≤ΩΦΰΜρΜζΙΙΖΝΑ≠Ε‘ΖΫΒΟΖ÷Θ§ΗΟΕ”ΫΪ±Μ»Γœϊ±»»ϋΉ ΗώΓΘΕύ ¥ΈΙ “βΖΗΙφΩ…ΡήΒΦ÷¬»ΓœϊΗΟΕ”ΒΡ≤Έ»ϋΉ ΗώΓΘ
8.9 ≤ΜΧΐ¥”≤Ο≈–‘±ΒΡ÷Η ΨΫΪ±Μ»Γœϊ±»»ϋΉ ΗώΓΘ
8.10 ≤Έ»ϋΕ”‘±‘ΎΈ¥Ψ≠≤Ο≈–≥Λ‘ –μΒΡ«ιΩωœ¬ΥΫΉ‘”κΫΧΝΖ‘±ΜρΦ“≥ΛΝΣœΒΘ§ΫΪ±Μ»Γœϊ±»»ϋΉ ΗώΓΘ
8.11 ±»»ϋ÷–ΉήΜα≤ζ…ζ“Μ–©Ρ―“‘ΙάΦΤΒΡΈ ΧβΘ§≤Ο≈–‘±Ήώ―≠ΒΡ‘≠‘ρ «““…Έ ¥”ΈόΘ§≤ΟΕ®¥”Ωμ”ΓΘ
9 Ϋ±άχ
”…”Ύ FLLΜζΤς»ΥΙΛ≥ΧΧτ’Ϋ»ϋΑϋά®ΜζΤς»ΥΧτ’Ϋ»ϋΘ®”––ß≥Γ¥ΈΒΡΒΟΖ÷ΉήΚΆΘ©ΓΔΩΈΧβ―–ΨΩΘ®100 Ζ÷Θ©ΓΔΦΦ θΈ ±γΘ®100 Ζ÷Θ©ΓΔΆ≈Ε”ΚœΉςΘ®100 Ζ÷Θ©ΥΡΗω≤ΩΖ÷ΓΘ≤Έ»ϋΕ”Α¥’βΥΡ≤ΩΖ÷ΒΟΖ÷ ΒΡΉήΚΆ≈≈ΟϊΓΘ»γΙϊ≥ωœ÷Ψ÷≤Ω≤ΔΝ–ΒΡ«ιΩωΘ§Α¥≤ΔΝ–≤Έ»ϋΕ”‘ΎΜζΤς»ΥΧτ’Ϋ»ϋΫα χΚσΒΡ≈≈Οϊ»Ζ Ε®œ»ΚσΓΘ
’’≤Έ»ϋΕ”≈≈Οϊ»ΖΕ®ΜώΫ±Β»ΦΕΘ§«Α 6 ΟϊΜώ“ΜΒ»Ϋ±Θ§ΑδΖΔΫπ≈ΤΚΆ÷Λ ιΘΜ«Α 3 ΟϊΈΣΙΎΨϋΓΔ ―«ΨϋΚΆΦΨΨϋΘ§ΙΎΨϋΕ”ΑδΖΔΫ±±≠ΘΜΤδ”ύ≤Έ»ϋΕ”ΈιΘ®…œ≥Γ≤Έ»ϋ≤ΔΜώ≥…Φ®’ΏΘ©ΒΡ«Α 40%ΜώΕΰΒ» Ϋ±Θ§Κσ 60%Μώ»ΐΒ»Ϋ±Θ§Ζ÷±πΑδΖΔ“χ≈ΤΓΔΆ≠≈ΤΚΆ÷Λ ιΓΘ
10 ΤδΥϋ
10.1 ±ΨΙφ‘ρ « Β ©≤Ο≈–ΙΛΉςΒΡ“άΨίΓΘ‘ΎΨΚ»ϋ÷–Θ§≤Ο≈–”–≤ΟΕ®»®Θ§ΥϊΟ«ΒΡ≤ΟΨω «Ήν÷’≤ΟΨωΓΘ ≤Ο≈–≤ΜΜαΗ¥≤ι÷ΊΖ≈ΒΡ±»»ϋ¬ΦœώΓΘΙΊ”Ύ≤Ο≈–ΒΡ»ΈΚΈΈ Χβ±Ί–κ”…“ΜΟϊ―ß…ζ¥ζ±μ‘ΎΝΫ≥Γ±»»ϋ÷° Φδœρ≤Ο≈–≥ΛΧα≥ωΘ§«“≤ΜΒΟ”Αœλ±»»ϋΒΡΫχΕ»ΓΘΉιΈ·Μα≤ΜΫ” ήΫΧΝΖ‘±ΜρΦ“≥ΛΒΡΆΕΥΏΓΘ
10.2 ÷–Ιζ«ύ…ΌΡξΜζΤς»ΥΫΧ”ΐ‘ΎœΏΆχ’Ψ http://robot.xiaoxiaotong.org/Ω…Ρή“‘“÷Ί“ΣΆ®÷Σ” ΒΡ–Έ ΫΖΔ≤ΦΙΊ”Ύ±»»ϋΙφ‘ρΒΡ»ΈΚΈ–όΕ©ΓΘ
10.3 ΙΊ”ΎΙφ‘ρΒΡΈ ΧβΩ…Ά®ΙΐΗΟΆχ’ΨΒΡ Q&A άΗΡΩ¥π“…ΓΘ
10.4 ±»»ϋΤΎΦδΘ§Ζ≤ «Ιφ‘ρ÷–Έ¥”ηΥΒΟςΒΡ ¬œν”…≤Ο≈–Έ·‘±ΜαΨωΕ®ΓΘΨΚ»ϋΉιΈ·ΜαΈ·Ά–≤Ο≈–Έ· ‘±ΜαΕ‘¥ΥΙφ‘ρΫχ––Ϋβ Ά”κ–όΗΡΓΘ‘Ύ¥σΕύ ΐ≤Έ»ϋΕ”ΈιΆ§“βΒΡ«ΑΧαœ¬Θ§’κΕ‘ΧΊ β«ιΩωΘ®άΐ»γ “Μ–©ΈόΖ®‘ΛΝœΒΡΈ ΧβΚΆ/ΜρΜζΤς»ΥΒΡ–‘ΡήΈ ΧβΒ»Θ©Θ§Ιφ‘ρΩ…ΉςΧΊ β–όΗΡΓΘ
ΗΫ¬Φ